Rgz pe soluție de mecanică tehnică. Legi și formule de bază în mecanica teoretică. Rezolvarea exemplelor. Teorema privind modificarea energiei cinetice a unui sistem mecanic
Mulți studenți se confruntă cu anumite dificultăți atunci când încep să predea discipline tehnice de bază, cum ar fi rezistența materialelor și mecanica teoretică, în cursul lor de studii. Acest articol va lua în considerare unul dintre aceste subiecte - așa-numita mecanică tehnică.
Mecanica tehnică este știința care studiază diverse mecanisme, sinteza si analiza lor. În practică, aceasta înseamnă o combinație de trei discipline - rezistența materialelor, mecanica teoretică și piesele de mașină. Este convenabil prin faptul că fiecare instituție de învățământ alege în ce proporție să predea aceste cursuri.
În consecință, în majoritatea lucrări de control Sarcinile sunt împărțite în trei blocuri, care trebuie rezolvate separat sau împreună. Să luăm în considerare cele mai comune sarcini.
Secțiunea unu. Mecanica teoretică
Din varietatea de probleme din mecanica teoretică, cel mai adesea se pot întâlni probleme din secțiunea de cinematică și statică. Acestea sunt sarcini privind echilibrul unui cadru plat, definirea legilor mișcării corpurilor și analiza cinematică a mecanismului pârghiei.
Pentru a rezolva probleme pentru echilibrul unui cadru plat, este necesar să folosiți ecuația de echilibru pentru un sistem plat de forțe:
![]()
Suma proiecțiilor tuturor forțelor pe axele de coordonate este egală cu zero, iar suma momentelor tuturor forțelor în jurul oricărui punct este egală cu zero. Rezolvând împreună aceste ecuații, determinăm mărimea reacțiilor tuturor suporturilor cadrului plat.
În sarcinile de determinare a principalelor parametri cinematici ai mișcării corpurilor, este necesar, pe baza unei traiectorii date sau a legii de mișcare a unui punct material, să se determine viteza, accelerația (completă, tangențială și normală) și raza lui. curbura traiectoriei. Legile mișcării punctului sunt date de ecuațiile de traiectorie:
Proiecțiile vitezei punctului pe axele de coordonate se găsesc prin diferențierea ecuațiilor corespunzătoare:
![]()
Prin diferențierea ecuațiilor vitezei, găsim proiecțiile accelerației punctului. Accelerațiile tangențiale și normale, raza de curbură a traiectoriei se găsesc grafic sau analitic:
![]()
![]()
Analiza cinematică a mecanismului pârghiei se efectuează conform următoarei scheme:
- Împărțirea mecanismului în grupuri Assur
- Construcție pentru fiecare dintre grupurile de planuri pentru viteze și accelerații
- Determinarea vitezelor și accelerațiilor tuturor legăturilor și punctelor mecanismului.
Secțiunea a doua. Rezistența materialelor
Rezistența materialelor este o secțiune destul de greu de înțeles, cu multe sarcini diferite, dintre care majoritatea sunt rezolvate după propria metodologie. Pentru a facilita rezolvarea problemelor studenților, cel mai adesea în cursul mecanicii aplicate li se dau probleme elementare pentru rezistența simplă a structurilor - în plus, tipul și materialul structurii, de regulă, depind de profilul universității.
Cele mai frecvente probleme sunt tensiune-compresie, îndoire și torsiune.
În problemele de tensiune-compresie, este necesar să se construiască diagrame ale forțelor longitudinale și ale tensiunilor normale, cât și uneori și deplasări ale secțiunilor structurale.
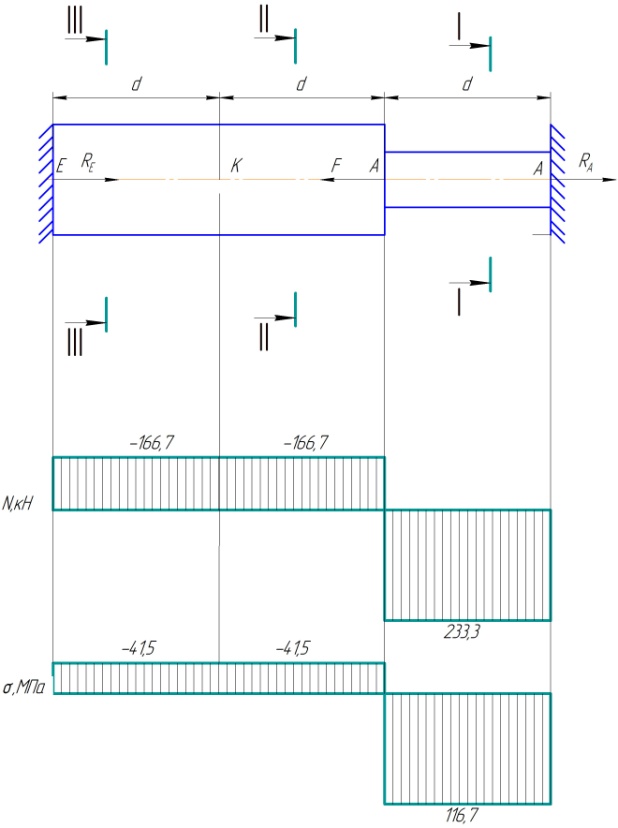
Pentru a face acest lucru, este necesar să împărțiți structura în secțiuni, ale căror limite vor fi locurile în care se aplică sarcina sau se modifică aria secțiunii transversale. În plus, aplicând formulele pentru echilibrul unui corp solid, determinăm valorile forțelor interne la limitele secțiunilor și, ținând cont de aria secțiunii transversale, tensiunile interne.
Conform datelor obținute, construim grafice - diagrame, luând ca axa graficului axa de simetrie a structurii.
Problemele de torsiune sunt similare cu problemele de încovoiere, cu excepția faptului că în loc de forțe de tracțiune, cupluri sunt aplicate corpului. Având în vedere acest lucru, este necesar să repetați pașii de calcul - împărțirea în secțiuni, determinarea momentelor de răsucire și a unghiurilor de răsucire și de trasare.
În problemele de încovoiere, este necesar să se calculeze și să se determine forțele transversale și momentele de încovoiere pentru o grindă încărcată.
În primul rând, se determină reacțiile suporturilor în care este fixată grinda. Pentru a face acest lucru, trebuie să scrieți ecuațiile de echilibru ale structurii, ținând cont de toate forțele care acționează.
După aceea, fasciculul este împărțit în secțiuni, ale căror limite vor fi punctele de aplicare forțe externe. Luând în considerare echilibrul fiecărei secțiuni separat, se determină forțele transversale și momentele încovoietoare la limitele secțiunilor. Pe baza datelor obținute se construiesc parcele.
Testul de rezistență în secțiune transversală se efectuează după cum urmează:
- Se determină locația secțiunii periculoase - secțiunea în care vor acționa cele mai mari momente de încovoiere.
- Din starea de rezistență la încovoiere se determină momentul de rezistență al secțiunii transversale a grinzii.
- Dimensiunea caracteristică a secțiunii este determinată - diametrul, lungimea laterală sau numărul profilului.
Secțiunea a treia. Piese de mașină
Secțiunea „Detalii mașină” combină toate sarcinile pentru calcularea mecanismelor care funcționează în condiții reale - aceasta poate fi un transportor sau un tren de viteze. Facilitează foarte mult sarcina ca toate formulele și metodele de calcul să fie date în cărți de referință, iar studentul trebuie doar să aleagă pe cele care sunt potrivite pentru un anumit mecanism.
Literatură
- Mecanica teoretică: Ghid și sarcini de control pentru studenții cu frecvență redusă de la specialitățile superioare de inginerie, construcții, transporturi, instrumentar institutii de invatamant/ Ed. prof. S.M.Targa, - M.: facultate, 1989 Ediţia a patra;
- A. V. Darkov, G. S. Shpiro. "Rezistența materialelor";
- Chernavsky S.A. Curs de proiectare a pieselor de mașini: Proc. manual pentru studenții specialităților de inginerie mecanică ai școlilor tehnice / S. A. Chernavsky, K. N. Bokov, I. M. Chernin etc. - ed. a II-a, revizuită. si suplimentare - M. Mashinostroenie, 1988. - 416 p.: ill.
Solutie de mecanica tehnica la comanda
Firma noastra ofera si servicii de rezolvare a problemelor si probelor in mecanica. Dacă aveți dificultăți în înțelegerea acestui subiect, puteți oricând să comandați o soluție detaliată de la noi. Ne asumăm sarcini dificile!
poate fi gratuit.
Cinematică
Cinematica unui punct material
Determinarea vitezei și accelerației unui punct din ecuații date mișcările ei
Dat: Ecuațiile mișcării unui punct: x = 12 sin(πt/6), cm; y= 6 cos 2 (πt/6), cm.
Setați tipul traiectoriei sale și pentru momentul de timp t = 1 s găsiți poziția unui punct pe traiectorie, viteza acestuia, accelerațiile complete, tangențiale și normale, precum și raza de curbură a traiectoriei.
Mișcarea de translație și rotație a unui corp rigid

Dat:
t = 2 s; r1 = 2 cm, R1 = 4 cm; r2 = 6 cm, R2 = 8 cm; r 3 \u003d 12 cm, R 3 \u003d 16 cm; s 5 \u003d t 3 - 6t (cm).
Să se determine la momentul t = 2 vitezele punctelor A, C; accelerația unghiulară a roții 3; accelerația punctului B și accelerația rack 4.
Analiza cinematică a unui mecanism plat

Dat:
R1, R2, L, AB, w1.
Găsiți: ω 2 .

Mecanismul plat este format din tije 1, 2, 3, 4 si glisor E. Tijele sunt conectate prin intermediul unor balamale cilindrice. Punctul D este situat în mijlocul barei AB.
Dat: ω 1 , ε 1 .
Aflați: viteze V A , V B , V D și V E ; viteze unghiulare ω 2 , ω 3 şi ω 4 ; accelerația a B ; accelerația unghiulară ε AB a verigii AB; poziţiile centrelor instantanee ale vitezelor P 2 şi P 3 ale legăturilor 2 şi 3 ale mecanismului.
Determinarea vitezei absolute și a accelerației absolute a unui punct

O placă dreptunghiulară se rotește în jurul unei axe fixe conform legii φ = 6 t 2 - 3 t 3. Direcția pozitivă de citire a unghiului φ este prezentată în figuri printr-o săgeată arc. Axa de rotație OO 1 se află în planul plăcii (placa se rotește în spațiu).
Punctul M se deplasează de-a lungul liniei drepte BD de-a lungul plăcii. Este dată legea mișcării sale relative, adică dependența s = AM = 40(t - 2 t 3) - 40(s - în centimetri, t - în secunde). Distanța b = 20 cm. În figură, punctul M este prezentat în poziția în care s = AM > 0 (pentru s< 0 punctul M este de cealaltă parte a punctului A).
Aflați viteza absolută și accelerația absolută a punctului M la momentul t 1 = 1 s.
Dinamica
Integrarea ecuațiilor diferențiale ale mișcării unui punct material sub acțiunea forțelor variabile
O sarcină D de masă m, care a primit o viteză inițială V 0 în punctul A, se deplasează într-o țeavă curbă ABC situată într-un plan vertical. Pe secțiunea AB, a cărei lungime este l, sarcina este afectată de o forță constantă T (direcția acesteia este prezentată în figură) și de forța R a rezistenței mediului (modulul acestei forțe este R = μV). 2, vectorul R este îndreptat opus vitezei V a sarcinii).
Sarcina, după ce și-a încheiat mișcarea în secțiunea AB, în punctul B al țevii, fără a modifica valoarea modulului său de viteză, trece în secțiunea BC. Pe secțiunea BC, asupra sarcinii acționează o forță variabilă F, a cărei proiecție F x pe axa x este dată.
Considerând sarcina ca punct material, găsiți legea mișcării sale pe secțiunea BC, adică. x = f(t), unde x = BD. Ignorați frecarea sarcinii pe conductă.

Descărcați soluția
Teorema privind modificarea energiei cinetice a unui sistem mecanic
Sistemul mecanic este format din greutăți 1 și 2, o rolă cilindrică 3, scripete în două trepte 4 și 5. Corpurile sistemului sunt legate prin fire înfășurate pe scripete; secțiunile de fire sunt paralele cu planurile corespunzătoare. Rola (cilindrul solid omogen) se rostogolește de-a lungul planului de referință fără alunecare. Razele treptelor scripetelor 4 și 5 sunt, respectiv, R 4 = 0,3 m, r 4 = 0,1 m, R 5 = 0,2 m, r 5 = 0,1 m. Masa fiecărui scripete este considerată uniform distribuită de-a lungul marginii sale exterioare. Planurile de sprijin ale greutăților 1 și 2 sunt brute, coeficientul de frecare de alunecare pentru fiecare greutate este f = 0,1.
Sub acțiunea forței F, al cărei modul se modifică conform legii F = F(s), unde s este deplasarea punctului de aplicare a acesteia, sistemul începe să se miște din starea de repaus. Când sistemul se mișcă, asupra scripetelui 5 acționează forțe de rezistență, al cărui moment față de axa de rotație este constant și egal cu M5.
Să se determine valoarea vitezei unghiulare a scripetelui 4 în momentul în care deplasarea s a punctului de aplicare a forței F devine egală cu s 1 = 1,2 m. 
Descărcați soluția
Aplicarea ecuației generale a dinamicii la studiul mișcării unui sistem mecanic
Pentru un sistem mecanic, determinați accelerația liniară a 1 . Luați în considerare că pentru blocuri și role masele sunt distribuite de-a lungul razei exterioare. Cablurile și curelele sunt considerate lipsite de greutate și inextensibile; nu există alunecare. Ignorați frecarea de rulare și alunecare. 
Descărcați soluția
Aplicarea principiului d'Alembert la determinarea reacţiilor suporturilor unui corp rotativ
Arbore vertical AK care se rotește uniform cu viteză unghiularăω \u003d 10 s -1, fixat cu un rulment axial în punctul A și un rulment cilindric în punctul D.
O tijă fără greutate 1 cu lungimea l 1 = 0,3 m este atașată rigid de arbore, pe capăt liber care are o sarcină cu masa m 1 = 4 kg, și o tijă omogenă 2 cu lungimea de l 2 = 0,6 m, având masa m 2 = 8 kg. Ambele tije se află în același plan vertical. Punctele de atașare a tijelor la arbore, precum și unghiurile α și β sunt indicate în tabel. Dimensiuni AB=BD=DE=EK=b, unde b = 0,4 m. Luați sarcina ca punct material.
Neglijând masa arborelui, determinați reacțiile lagărului axial și ale rulmentului.

Sunt date sarcini pentru lucrări de decontare-analitică și decontare-grafică pe toate secțiunile cursului de mecanică tehnică. Fiecare sarcină include o descriere a soluționării problemelor cu un scurt instrucțiuni, sunt date exemple de soluții. Aplicațiile conțin necesarul material de referinta. Pentru elevii specialităților construcții ai școlilor secundare profesionale.
Determinarea reacțiilor legăturilor ideale în mod analitic.
1. Indicați punctul al cărui echilibru este luat în considerare. În sarcini pentru muncă independentă un astfel de punct este centrul de greutate al corpului sau punctul de intersecție al tuturor tijelor și firelor.
2. Aplicați forțe active la punctul considerat. În sarcinile pentru munca independentă, forțele active sunt greutatea proprie a corpului sau greutatea sarcinii, care sunt îndreptate în jos (mai corect, spre centrul de greutate al pământului). În prezența unui bloc, greutatea sarcinii acționează asupra punctului considerat de-a lungul filetului. Direcția acestei forțe este determinată din desen. Greutatea corporală este de obicei indicată cu litera G.
3. Aruncați mental conexiunile, înlocuindu-le acțiunea cu reacții ale conexiunilor. În problemele propuse, sunt utilizate trei tipuri de legături - un plan ideal neted, în mod ideal tije drepte rigide și filete ideal flexibile - denumite în continuare plan, tijă și, respectiv, filet.
CUPRINS
cuvânt înainte
Sectiunea I. Munca independenta si de control
Capitolul 1. Mecanica teoretică. Statică
1.1. Determinarea analitică a reacțiilor de legătură ideală
1.2. Determinarea reacțiilor de susținere a unei grinzi pe doi suporturi sub acțiunea sarcinilor verticale
1.3. Determinarea poziţiei centrului de greutate al secţiunii
Capitolul 2. Rezistenta materialelor
2.1. Selectarea secțiunilor de tijă în funcție de rezistență
2.2. Determinarea principalelor momente centrale de inerție a secțiunii
2.3. Trasarea forțelor tăietoare și a momentelor de încovoiere pentru o grindă simplă
2.4. Determinarea valorii admisibile a forţei centrale de compresiune
capitolul 3
3.1. Construcția de diagrame de forțe interne pentru cel mai simplu cadru cu un singur circuit
3.2. Determinarea grafică a forțelor în truss rods prin construirea unei diagrame Maxwell-Cremona
3.3. Determinarea mișcărilor liniare în cele mai simple cadre cantilever
3.4. Calculul unui fascicul static nedeterminat (continuu) conform ecuației a trei momente
Secțiunea II. Aşezare şi lucrări grafice
Capitolul 4. Mecanica teoretică. Statică
4.1. Determinarea forțelor în tijele celei mai simple ferme în consolă
4.2. Determinarea reacțiilor de susținere a unei grinzi pe două suporturi
4.3. Determinarea poziţiei centrului de greutate al secţiunii
capitolul 5
5.1. Determinarea forțelor în bare ale unui sistem static nedeterminat
5.2. Determinarea principalelor momente de inerție a secțiunii
5.3. Selectarea secțiunii unei grinzi dintr-o grindă în I laminată
5.4. Selectarea secțiunii raftului compozit comprimat central
Capitolul 6
6.1. Determinarea forțelor în secțiuni ale unui arc cu trei balamale
6.2. Determinarea grafică a forțelor în barele unei ferme plane prin construirea unei diagrame Maxwell - Cremona
6.3. Calculul unui cadru static nedeterminat
6.4. Calculul unui fascicul continuu după ecuația a trei momente
Aplicații
Bibliografie.
Descărcați gratuit cărți electronice într-un format convenabil, vizionați și citiți:
Descarcă cartea Colecția de probleme în mecanica tehnică, Setkov VI, 2003 - fileskachat.com, descărcare rapidă și gratuită.
Descărcați pdf
Mai jos puteți cumpăra această carte la cel mai bun preț redus cu livrare în toată Rusia.


