What is called mechanical vibrations. Mechanical vibrations. Energy conversion during mechanical vibrations
Mechanical vibrations
1. Mechanical vibrations
1.1 Mechanical vibrations: harmonic, damped and forced vibrations
1.2 Self-oscillations
1.3 Decomposition of oscillations into a harmonic spectrum. Using Harmonic Analysis to Process Diagnostic Data
1.4 mechanical waves, their types and propagation speed
1.5 Energy characteristics of the wave
List of sources used
1. Mechanical vibrations
1.1 Mechanical vibrations: harmonic, damped and forced vibrations
Oscillations are called processes that differ in one degree or another of repeatability (the swing of the pendulum of a clock, the vibration of a string or legs of a tuning fork, the voltage between the capacitor plates in the radio circuit, the work of the heart).
Depending on the physical nature of a repeating process, oscillations are distinguished: mechanical, electromagnetic, electromechanical, etc. We will consider mechanical vibrations. Vibrations that occur in the absence of friction and external forces, are called proper; their frequency depends only on the properties of the system.
The simplest are harmonic oscillations, i.e. such oscillations in which the oscillating value (for example, the deviation of the pendulum) changes with time according to the law of sine or cosine.
Differential Equation of Harmonic Oscillation
Consider the simplest oscillatory system: a ball of mass m is suspended on a spring.
In this case, the elastic force F1 balances the force of gravity mg. If the ball is displaced by a distance X, then a large elastic force (F 1 + F). The change in the elastic force according to Hooke's law is proportional to the change in the length of the spring or the displacement of the ball x:
where k is the stiffness of the spring. The "-" sign reflects the fact that displacement and force are in opposite directions.
where (w 0 t + a 0) = a is the phase of oscillations; a 0 - initial phase at t = 0; w 0 - circular frequency of oscillations; A is their amplitude.
So, the offset x changes with time according to the law of cosine.
Consequently, the motion of a system under the action of a force of the form f = - kx is a harmonic oscillation.
For a spring pendulum we get:
The circular frequency is related to the usual n ratio: .
Energy at harmonic oscillation
Let us find out how the kinetic Ek and potential Ep harmonic vibration energy. The kinetic energy is:
, (4)where k = m w 0 2 .
The potential energy is found from the potential energy formula for elastic deformation and using (3):
(5)Adding (4) and (5), taking into account the relation
, we get:E = E K + E P =
. (6)Thus, the total energy of a harmonic oscillation remains constant in the absence of friction forces, during the oscillatory process kinetic energy becomes potential and vice versa.
damped vibrations
Oscillations occurring in the system in the absence of external forces (but in the presence of friction or radiation losses) are called free. The frequency of free oscillations depends on the properties of the system and the intensity of losses.
The presence of friction leads to damped oscillations. Oscillations with decreasing amplitude are called damped.
Let us assume that, in addition to the quasi-elastic force, the system is affected by the resistance forces of the medium (friction), then Newton's second law has the form:
. (7)We confine ourselves to considering small oscillations, then the speed of the system will also be small, and at low speeds, the resistance force is proportional to the speed:
, (8)where r is the drag coefficient of the medium. Sign " - " due to the fact that F tr and V have opposite directions.
Let us substitute (8) into (7). Then
orDenote
,
where b is the damping coefficient, w 0 is the circular frequency of natural oscillations. Then
The solution of this equation essentially depends on the sign of the difference: w 2 = w 0 2 -b 2 , where w is the circular frequency of damped oscillations. Under the condition w 0 2 -b 2 > 0, w is a real value and solution (3) will be as follows:
The graph of this function is given in the figure.
Rice. 2. Damped oscillations.
The dotted line shows the change in amplitude: A = ±A 0 e - b t .
The period of damped oscillations depends on the coefficient of friction and is equal to:
(11)With little resistance of the medium (b2< From the formula expressing the law of decrease in the amplitude of the oscillations, one can make sure that the ratio of the amplitudes separated from each other by an interval of one period (T) remains constant throughout the entire damping process. Indeed, the oscillation amplitudes, separated by an interval of one period, are expressed as follows: This relationship is called
this relationship:
This value is called the logarithmic damping decrement per period.
For strong damping b 2 > w02, it follows from formula (11) that the oscillation period is an imaginary quantity. In this case, the movement is aperiodic (non-periodic) in nature - the system taken out of the equilibrium position returns to the equilibrium position without oscillating. Which of these ways the system comes to equilibrium depends on the initial conditions.
Forced vibrations. Resonance
compelled called such vibrations that occur in an oscillatory system under the action of an external periodically changing force (driving force). Let the driving force change with time according to the harmonic law: f = F0 cosW t , where F0 is the amplitude, W is the circular frequency of the driving force.
When compiling the equation of motion, it is necessary to take into account, in addition to the driving force, also those forces that act in the system during free vibrations, that is, the quasi-elastic force and the drag force of the medium. Then the equation of motion (Newton's second law) will be written as follows:
Dividing this equation by m and moving the terms with dx and d 2 x to the left side, we obtain a non-homogeneous second-order linear differential equation.
There are different types of oscillations in physics, characterized by certain parameters. Consider their main differences, classification according to various factors.
Basic definitions
Oscillation is understood as a process in which, at regular intervals, the main characteristics of the movement have the same values.
Such oscillations are called periodic, in which the values of the basic quantities are repeated at regular intervals (period of oscillations).
Varieties of oscillatory processes
Let us consider the main types of oscillations that exist in fundamental physics.
Free vibrations are those that occur in a system that is not subjected to external variable influences after the initial shock.
An example of free oscillations is a mathematical pendulum.
Those types of mechanical vibrations that occur in the system under the action of an external variable force.

Features of the classification
According to the physical nature, the following types of oscillatory movements are distinguished:
- mechanical;
- thermal;
- electromagnetic;
- mixed.
According to the option of interaction with the environment
Types of oscillations in interaction with the environment are divided into several groups.
Forced oscillations appear in the system under the action of an external periodic action. As examples of this type of oscillation, we can consider the movement of hands, leaves on trees.
For forced harmonic oscillations, a resonance may appear, in which, with equal values of the frequency of the external action and the oscillator, with a sharp increase in amplitude.
Natural vibrations in the system under the influence of internal forces after it is taken out of equilibrium. The simplest variant of free vibrations is the movement of a load that is suspended on a thread or attached to a spring.
Self-oscillations are called types in which the system has a certain amount of potential energy used to make oscillations. Their distinctive feature is the fact that the amplitude is characterized by the properties of the system itself, and not by the initial conditions.
For random oscillations, the external load has a random value.

Basic parameters of oscillatory movements
All types of oscillations have certain characteristics, which should be mentioned separately.
Amplitude is the maximum deviation from the equilibrium position, the deviation of a fluctuating value, it is measured in meters.
The period is the time of one complete oscillation, after which the characteristics of the system are repeated, calculated in seconds.
The frequency is determined by the number of oscillations per unit of time, it is inversely proportional to the period of oscillation.
The oscillation phase characterizes the state of the system.

Characteristic of harmonic vibrations
Such types of oscillations occur according to the law of cosine or sine. Fourier managed to establish that any periodic oscillation can be represented as a sum of harmonic changes by expanding a certain function in
As an example, consider a pendulum having a certain period and cyclic frequency.
What characterizes these types of oscillations? Physics considers an idealized system, which consists of a material point, which is suspended on a weightless inextensible thread, oscillates under the influence of gravity.
Such types of vibrations have a certain amount of energy, they are common in nature and technology.
With prolonged oscillatory motion, the coordinates of its center of mass change, and with alternating current, the value of current and voltage in the circuit changes.
There are different types of harmonic oscillations according to their physical nature: electromagnetic, mechanical, etc.
The shaking of the vehicle, which moves on a rough road, acts as a forced oscillation.

The main differences between forced and free vibrations
These types of electromagnetic oscillations differ in physical characteristics. The presence of medium resistance and friction forces lead to damping of free oscillations. In the case of forced oscillations, energy losses are compensated by its additional supply from an external source.
The period of a spring pendulum relates the mass of the body and the stiffness of the spring. In the case of a mathematical pendulum, it depends on the length of the thread.
With a known period, it is possible to calculate the natural frequency of the oscillatory system.
In technology and nature, there are vibrations with different frequency values. For example, the pendulum that oscillates in St. Isaac's Cathedral in St. Petersburg has a frequency of 0.05 Hz, while for atoms it is several million megahertz.
After a certain period of time, the damping of free oscillations is observed. That is why forced oscillations are used in real practice. They are in demand in a variety of vibration machines. The vibratory hammer is a shock-vibration machine, which is intended for driving pipes, piles, and other metal structures into the ground.

Electromagnetic vibrations
Characteristics of vibration modes involves the analysis of the main physical parameters: charge, voltage, current strength. As an elementary system, which is used to observe electromagnetic oscillations, is an oscillatory circuit. It is formed by connecting a coil and a capacitor in series.
When the circuit is closed, free electromagnetic oscillations arise in it, associated with periodic changes in the electric charge on the capacitor and the current in the coil.
They are free due to the fact that when they are performed there is no external influence, but only the energy that is stored in the circuit itself is used.
In the absence of external influence, after a certain period of time, attenuation of the electromagnetic oscillation is observed. The reason for this phenomenon will be the gradual discharge of the capacitor, as well as the resistance that the coil actually has.
That is why damped oscillations occur in a real circuit. Reducing the charge on the capacitor leads to a decrease in the energy value in comparison with its original value. Gradually, it will be released in the form of heat on the connecting wires and the coil, the capacitor will be completely discharged, and the electromagnetic oscillation will be completed.

The Significance of Fluctuations in Science and Technology
Any movements that have a certain degree of repetition are oscillations. For example, a mathematical pendulum is characterized by a systematic deviation in both directions from the original vertical position.
For a spring pendulum, one complete oscillation corresponds to its movement up and down from the initial position.
In an electrical circuit that has capacitance and inductance, there is a repetition of charge on the plates of the capacitor. What is the cause of oscillatory movements? The pendulum functions due to the fact that gravity causes it to return to its original position. In the case of a spring model, a similar function is performed by the elastic force of the spring. Passing the equilibrium position, the load has a certain speed, therefore, by inertia, it moves past the average state.
Electrical oscillations can be explained by the potential difference that exists between the plates of a charged capacitor. Even when it is completely discharged, the current does not disappear, it is recharged.
In modern technology, oscillations are used, which differ significantly in their nature, degree of repetition, character, and also the "mechanism" of occurrence.
Mechanical vibrations are made by the strings of musical instruments, sea waves, and a pendulum. Chemical fluctuations associated with a change in the concentration of reactants are taken into account when conducting various interactions.
Electromagnetic oscillations make it possible to create various technical devices, for example, a telephone, ultrasonic medical devices.
Cepheid brightness fluctuations are of particular interest in astrophysics, and scientists from different countries are studying them.
Conclusion
All types of oscillations are closely related to a huge number of technical processes and physical phenomena. Their practical importance is great in aircraft construction, shipbuilding, the construction of residential complexes, electrical engineering, radio electronics, medicine, and fundamental science. An example of a typical oscillatory process in physiology is the movement of the heart muscle. Mechanical vibrations are found in organic and inorganic chemistry, meteorology, and also in many other natural sciences.
The first studies of the mathematical pendulum were carried out in the seventeenth century, and by the end of the nineteenth century, scientists were able to establish the nature of electromagnetic oscillations. The Russian scientist Alexander Popov, who is considered the "father" of radio communications, conducted his experiments precisely on the basis of the theory of electromagnetic oscillations, the results of research by Thomson, Huygens, and Rayleigh. He managed to find a practical application for electromagnetic oscillations, to use them to transmit a radio signal over a long distance.
Academician P. N. Lebedev for many years conducted experiments related to the production of high-frequency electromagnetic oscillations using alternating electric fields. Thanks to numerous experiments related to various types of vibrations, scientists have managed to find areas for their optimal use in modern science and technology.
Oscillations - this is the movement of a body, during which it repeatedly moves along the same trajectory and passes through the same points in space. Examples of oscillating objects are the pendulum of a clock, the string of a violin or piano, the vibrations of a car.
Vibrations play an important role in many physical phenomena outside the field of mechanics. For example, voltage and current in electrical circuits can fluctuate. Biological examples of oscillations are heart contractions, arterial pulses, and vocal cord production of sound.
Although the physical nature of oscillating systems may differ significantly, various types of oscillations can be characterized quantitatively in a similar way. A physical quantity that changes with time during oscillatory motion is called displacement
. Amplitude
represents the maximum displacement of the oscillating object from the equilibrium position. Full swing, or cycle
- this is a movement in which a body, taken out of equilibrium by a certain amplitude, returns to this position, deviates to the maximum displacement in the opposite direction and returns to its original position. Oscillation period T
is the time required to complete one complete cycle. The number of oscillations per unit of time is oscillation frequency
.
Simple harmonic oscillation
In some bodies, when they are stretched or compressed, forces arise that counteract these processes. These forces are directly proportional to the length of the stretch or compression. Springs have this property. When a body suspended from a spring is deflected from its equilibrium position and then released, its motion is a simple harmonic oscillation.
Consider a body with mass m suspended on a spring in the equilibrium position. By moving the body down, one can cause the body to oscillate. If - displacement of the body from the equilibrium position, then a force arises in the spring F(force of elasticity), directed in the opposite direction to the displacement. According to Hooke's law, the elastic force is proportional to the displacement F control = -k S, where k is a constant that depends on the elastic properties of the spring. The force is negative because it tends to return the body to a position of equilibrium.
acting on the body with a mass m, the elastic force gives it an acceleration along the displacement direction. According to Newton's law F=ma, where a = d 2 S/d 2 t. To simplify the following reasoning, we neglect friction and viscosity in an oscillating system. In this case, the amplitude of oscillations will not change with time.
If no external forces (even the resistance of the medium) act on the oscillating body, then the oscillations are carried out with a certain frequency. These oscillations are called free. The amplitude of such oscillations remains constant.
In this way, m d 2 S/d 2 t = -k S(one) . By moving all the terms of the equality and dividing them by m, we get the equations d 2 S/d 2 t +(k/m)·
S = 0
,
and then d 2 S/d 2 t + ω 0 2·
S = 0
(2), where k/m =ω 0 2
Equation (2) is differential equation of a simple harmonic oscillation.
The solution of equation (2) gives two functions:
S = A sin( ω 0 t + φ 0)
(3) and S = Acos( ω 0 t + φ 0)
(4)
Thus, if a body of mass m carries out simple harmonic oscillations, the change in the displacement of this body from the equilibrium point in time is carried out according to the law of sine or cosine.
(ω 0 t + φ 0) - oscillation phase with initial phase φ 0 . Phase is a property of oscillatory motion, which characterizes the amount of displacement of the body at any time. The phase is measured in radians.
Value called the angular, or circular, frequency. Measured in radians per second ω 0 = 2πν or ω 0 = 2 π /T (5)
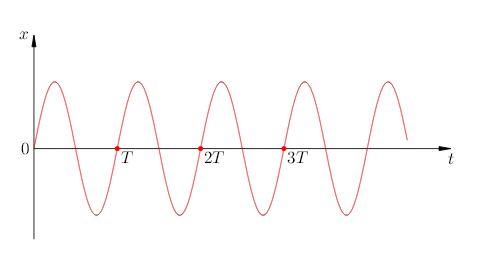
A graph of the equation of a simple harmonic oscillation is shown in Rice. one. A body initially displaced by a distance A - amplitudes fluctuations ,
and then let go, keeps swinging from -A and before A behind
time T- oscillation period.
Fig 1.
Thus, in the course of a simple harmonic oscillation, the displacement of the body changes in time along a sinusoid or cosine wave. Therefore, a simple harmonic oscillation is often referred to as a sinusoidal oscillation.
A simple harmonic oscillation has the following main characteristics:
A) the moving body is alternately on both sides of the equilibrium position;
b) the body repeats its movement in a certain time interval;
c) the acceleration of the body is always proportional to the displacement and directed opposite to it;
e) Graphically, this type of oscillation is described by a sinusoid.
damped oscillation
A simple harmonic oscillation cannot continue indefinitely at a constant amplitude. In real conditions, after some time, harmonic oscillations stop. Such harmonic oscillations in real systems are called damped vibrations ( fig.2 )
. The action of external forces, such as friction and viscosity, leads to a decrease in the amplitude of oscillations with their subsequent termination. These forces reduce the energy of vibrations. They're called dissipative forces, since they contribute to the dissipation of the potential and kinetic energy of macroscopic bodies into the energy of the thermal motion of atoms and molecules of the body.
 Fig 2.
Fig 2.
The magnitude of dissipative forces depends on the velocity of the body. If the velocity ν is relatively small, then the dissipative force F is directly proportional to this speed. F tr \u003d -rν \u003d -r dS / dt (6)
Here r is a constant coefficient, independent of the speed or frequency of oscillation. The minus sign indicates that the braking force is directed against the velocity vector.
Taking into account the action of dissipative forces, the differential equation of a harmonic damped oscillation has the form: m · d 2 S/d 2 t= -kS - r dS/dt .
Moving all the terms of the equality to one side, dividing each term by m and replacing k/m = ω 2 ,r/m = 2β , we get differential equation of free harmonic damped oscillations
where β is the damping coefficient characterizing the damping of oscillations per unit time.
The solution to the equation is the function S \u003d A 0 e -βt sin (ωt + φ 0) (8)
Equation (8) shows that the amplitude of the harmonic oscillation decreases exponentially with time. The frequency of damped oscillations is determined by the equation ω = √(ω 0 2- β 2) (9)
If oscillation cannot occur due to a large one, then the system returns to its equilibrium position along an exponential path without oscillation.
Forced oscillation and resonance
If no external energy is imparted to the oscillating system, then the amplitude of the harmonic oscillation decreases with time due to dissipative effects. The periodic action of the force can increase the amplitude of the oscillations. Now the oscillation will not fade with time, since the lost energy is replenished during each cycle by the action of an external force. If the balance of these two energies is achieved, then the amplitude of the oscillations will remain constant. The effect depends on the frequency ratio of the driving force ω and the system's natural oscillation frequency ω 0 .
If the body oscillates under the action of an external periodic force with the frequency of this external force, then the oscillation of the body is called forced.
The energy of an external force has the greatest effect on system oscillations if the external force has a certain frequency. This frequency should be the same as the frequency of natural oscillations of the system, which this system would perform in the absence of external forces. In this case, it happens resonance- the phenomenon of a sharp increase in the amplitude of oscillations when the frequency of the driving force coincides with the frequency of natural oscillations of the system.
mechanical waves
The propagation of vibrations from one place to another is called wave motion, or simply wave.
Mechanical waves are formed as a result of simple harmonic oscillations of the particles of the medium from their average position. The substance of the medium does not move from one place to another. But the particles of the medium that transfer energy to each other are necessary for the propagation of mechanical waves.
Thus, a mechanical wave is a perturbation of the material medium, which passes through this medium at a certain speed without changing its shape.
If a stone is thrown into the water, a single wave will run from the place of the disturbance of the medium. However, waves can sometimes be periodic. For example, a vibrating tuning fork produces alternating compression and rarefaction of the air surrounding it. These perturbations, perceived as sound, occur periodically at the frequency of the tuning fork.
There are two types of mechanical waves.
(1) transverse wave. This type of wave is characterized by the vibration of particles of the medium at a right angle to the direction of wave propagation. Transverse mechanical waves can only occur in solids and on the surface of liquids.
In a transverse wave, all particles of the medium perform a simple harmonic oscillation around their average positions. The position of maximum upward displacement is called " peak", and the position of the maximum shift down - " depression". The distance between two subsequent peaks or troughs is called the transverse wavelength λ.
(2) Longitudinal wave. This kind of waves is characterized by vibrations of particles of the medium along the direction of wave propagation. Longitudinal waves can propagate in liquids, gases and solids.
In a longitudinal wave, all particles of the medium also perform a simple harmonic oscillation around their average position. In some places, the particles of the medium are located closer, and in other places - farther than in the normal state.
The places where the particles are close together are called regions. compression, and the places where they are far from each other - areas rarefaction. The distance between two successive compressions or rarefactions is called the longitudinal wave length.
There are the following wave characteristics.
(1) Amplitude- the maximum displacement of an oscillating particle of the medium from its equilibrium position ( A).
(2) Period is the time required for a particle to complete one complete oscillation ( T).
(3) Frequency- the number of vibrations produced by a particle of the medium per unit of time (ν). There is an inverse relationship between the wave frequency and its period: ν = 1/T .
(4) Phase oscillating particle at any moment determines its position and direction of motion at a given moment. Phase is a fraction of a wavelength or period of time.
(5) Speed wave is the propagation velocity in space of the peak of the wave (v).
A set of medium particles oscillating in the same phase forms a wave front. From this point of view, waves are divided into two types.
(1) If the source of a wave is a point from which it propagates in all directions, then spherical wave.
(2) If the source of the wave is an oscillating flat surface, then plane wave.
The displacement of particles of a plane wave can be described by a general equation for all types of wave motion: S = A sin ω (t - x/v) (10)
This means that the offset value ( S) for each time value (t) and distance from the wave source ( x) depends on the oscillation amplitude ( A), angular frequency ( ω
) and wave velocity (v).
Doppler effect
The Doppler effect is a change in the frequency of a wave perceived by an observer (receiver) due to the relative motion of the wave source and the observer. If the wave source approaches the observer, the number of waves arriving at the observer of waves every second exceeds that emitted by the wave source. If the wave source moves away from the observer, then the number of emitted waves is greater than those arriving towards the observer.
A similar effect follows if the observer moves relative to a stationary source.
An example of the Doppler effect is the change in the frequency of a train whistle as it approaches and moves away from the observer.
The general equation for the Doppler effect is
Here ν source is the frequency of the waves emitted by the source, and ν receiver is the frequency of the waves perceived by the observer. ν 0 is the speed of waves in a stationary medium, ν is receiving and ν source is the speed of the observer and the wave source, respectively. The upper signs in the formula refer to the case when the source and the observer move towards each other. The lower signs refer to the case when the source and the observer of the waves move away from each other.
The change in the frequency of the waves due to the Doppler effect is called the Doppler frequency shift. This phenomenon is used to measure the speed of movement of various bodies, including red blood cells in blood vessels.
See tasks on the topic "
(or natural vibrations) are vibrations of an oscillatory system, performed only due to the initially reported energy (potential or kinetic) in the absence of external influences.
Potential or kinetic energy can be communicated, for example, in mechanical systems through an initial displacement or an initial velocity.
Freely oscillating bodies always interact with other bodies and together with them form a system of bodies called oscillatory system.
For example, a spring, a ball, and a vertical post to which the upper end of the spring is attached (see figure below) are included in an oscillatory system. Here the ball slides freely along the string (friction forces are negligible). If you take the ball to the right and leave it to itself, it will oscillate freely around the equilibrium position (point ABOUT) due to the action of the elastic force of the spring directed towards the equilibrium position.
Another classic example of a mechanical oscillatory system is the mathematical pendulum (see figure below). In this case, the ball performs free oscillations under the action of two forces: gravity and the elastic force of the thread (the Earth also enters the oscillatory system). Their resultant is directed to the equilibrium position.

The forces acting between the bodies of an oscillatory system are called internal forces. Outside forces are called the forces acting on the system from the bodies that are not included in it. From this point of view, free oscillations can be defined as oscillations in the system under the action of internal forces after the system is taken out of equilibrium.
The conditions for the occurrence of free vibrations are:
1) the emergence of a force in them that returns the system to a position of stable equilibrium after it has been taken out of this state;
2) no friction in the system.
Dynamics of free oscillations.
Vibrations of a body under the action of elastic forces. The equation of oscillatory motion of a body under the action of an elastic force F() can be obtained taking into account Newton's second law ( F = ma) and Hooke's law ( F control = -kx), where m is the mass of the ball, and is the acceleration acquired by the ball under the action of the elastic force, k- coefficient of spring stiffness, X is the displacement of the body from the equilibrium position (both equations are written in projection onto the horizontal axis Oh). Equating the right sides of these equations and taking into account that the acceleration but is the second derivative of the coordinate X(offsets), we get:
 .
.
Similarly, the expression for acceleration but we get by differentiating ( v = -v m sin ω 0 t = -v m x m cos (ω 0 t + π/2)):
a \u003d -a m cos ω 0 t,
where a m = ω 2 0 x m is the acceleration amplitude. Thus, the amplitude of the speed of harmonic oscillations is proportional to the frequency, and the acceleration amplitude is proportional to the square of the oscillation frequency.
Topics of the USE codifier: harmonic oscillations; amplitude, period, frequency, phase of oscillations; free vibrations, forced vibrations, resonance.
fluctuations are changes in the state of the system that repeat over time. The concept of oscillations covers a very wide range of phenomena.
Vibrations of mechanical systems, or mechanical vibrations- this is a mechanical movement of a body or a system of bodies, which has a repeatability in time and occurs in the vicinity of the equilibrium position. equilibrium position This is the state of the system in which it can remain for an arbitrarily long time without experiencing external influences.
For example, if the pendulum is deflected and released, then oscillations will begin. The equilibrium position is the position of the pendulum in the absence of deflection. In this position, the pendulum, if left untouched, can remain indefinitely. When the pendulum oscillates, it passes the equilibrium position many times.
Immediately after the deflected pendulum was released, it began to move, passed the equilibrium position, reached the opposite extreme position, stopped for a moment in it, moved in the opposite direction, passed the equilibrium position again and returned back. One thing happened full swing. This process will then be repeated periodically.
Amplitude of body oscillations is the magnitude of its greatest deviation from the equilibrium position.
Oscillation period is the time for one complete oscillation. We can say that for the period the body travels a path of four amplitudes.
Oscillation frequency is the reciprocal of the period: . Frequency is measured in hertz (Hz) and indicates how many complete oscillations occur in one second.
Harmonic vibrations.
We will assume that the position of the oscillating body is determined by a single coordinate . The value corresponds to the equilibrium position. The main task of mechanics in this case is to find a function that gives the coordinate of the body at any time.
For the mathematical description of oscillations, it is natural to use periodic functions. There are many such functions, but two of them - sine and cosine - are the most important. They have many good properties and are closely related to a wide range of physical phenomena.
Since the sine and cosine functions are obtained from each other by shifting the argument by , we can limit ourselves to only one of them. For definiteness, we will use the cosine.
Harmonic vibrations are oscillations in which the coordinate depends on time according to the harmonic law:
(1)
Let us find out the meaning of the quantities included in this formula.
A positive value is the largest coordinate value in absolute value (since the maximum value of the cosine modulus is equal to one), i.e., the largest deviation from the equilibrium position. Therefore - the amplitude of oscillations.
The cosine argument is called phase fluctuations. The value equal to the value of the phase at is called the initial phase. The initial phase corresponds to the initial coordinate of the body: .
The value is called cyclic frequency. Let's find its connection with the oscillation period and frequency. One complete oscillation corresponds to a phase increment equal to radians: , whence
(2)
(3)
The cyclic frequency is measured in rad/s (radians per second).
In accordance with expressions (2) and (3), we obtain two more forms of recording the harmonic law (1) :
The graph of the function (1), which expresses the dependence of the coordinate on time for harmonic oscillations, is shown in fig. one .
The harmonic law of the form (1) is of the most general nature. It answers, for example, the situation when two initial actions were performed simultaneously with the pendulum: they deflected it by an amount and gave it some initial speed. There are two important special cases where one of these actions was not performed.
Let the pendulum be rejected, but the initial speed was not reported (they were released without the initial speed). It is clear that in this case , so we can put . We get the law of cosine:
The graph of harmonic oscillations in this case is shown in Fig. 2 .
 |
| Rice. 2. Law of cosine |
Let us now assume that the pendulum was not deflected, but the initial velocity was imparted to it from the equilibrium position by a blow. In this case , so you can put . We get the sine law:
The schedule of fluctuations is presented on fig. 3 .
 |
| Rice. 3. Law of sine |
The equation of harmonic oscillations.
Let's return to the general harmonic law (1) . Let's differentiate this equation:
. (4)
Now we differentiate the resulting equality (4) :
. (5)
Let's compare expression (1) for the coordinate and expression (5) for the acceleration projection. We see that the acceleration projection differs from the coordinate only by the factor :
. (6)
This ratio is called equation of harmonic oscillations. It can also be rewritten in this form:
. (7)
From a mathematical point of view, equation (7) is differential equation. The solutions of differential equations are functions (and not numbers, as in ordinary algebra).
So, we can prove that:
The solution of equation (7) is any function of the form (1) with arbitrary ;
No other function is a solution to this equation.
In other words, relations (6) , (7) describe harmonic oscillations with a cyclic frequency and only them. Two constants are determined from the initial conditions - by the initial values of the coordinate and velocity.
Spring pendulum.
Spring pendulum is a load fixed on a spring, capable of oscillating in a horizontal or vertical direction.
Let's find the period of small horizontal oscillations of the spring pendulum (Fig. 4). Oscillations will be small if the magnitude of the deformation of the spring is much less than its dimensions. For small deformations, we can use Hooke's law. This will cause the oscillations to be harmonic.
We neglect friction. The mass has a mass and the spring constant is .
The coordinate corresponds to the equilibrium position in which the spring is not deformed. Therefore, the magnitude of the spring deformation is equal to the modulus of the load coordinate.
 |
| Rice. 4. Spring pendulum |
In the horizontal direction, only the elastic force from the spring acts on the load. Newton's second law for the load in the projection on the axis is:
. (8)
If (the load is shifted to the right, as in the figure), then the elastic force is directed in the opposite direction, and . Conversely, if , then . The signs and are opposite all the time, so Hooke's law can be written as follows:
Then relation (8) takes the form:
We have obtained an equation of harmonic oscillations of the form (6) , in which
The cyclic frequency of oscillation of a spring pendulum is thus equal to:
. (9)
From here and from the ratio we find the period of horizontal oscillations of the spring pendulum:
. (10)
If you hang a weight on a spring, you get a spring pendulum that oscillates in the vertical direction. It can be shown that in this case the formula (10) is also valid for the oscillation period.
Mathematical pendulum.
Mathematical pendulum - this is a small body suspended on a weightless inextensible thread (Fig. 5). A mathematical pendulum can oscillate in a vertical plane in the field of gravity.
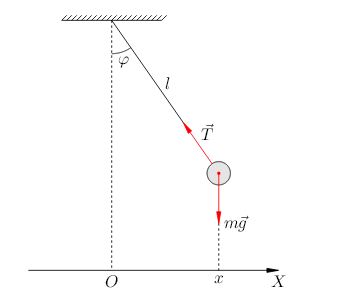 |
| Rice. 5. Mathematical pendulum |
Let us find the period of small oscillations of the mathematical pendulum. The thread length is . Air resistance is neglected.
Let's write down Newton's second law for the pendulum:
and project it onto the axis :
If the pendulum occupies a position as in the figure (i.e.), then:
If the pendulum is on the other side of the equilibrium position (i.e.), then:
So, for any position of the pendulum we have:
. (11)
When the pendulum is at rest in the equilibrium position, the equality is fulfilled. For small oscillations, when the deviations of the pendulum from the equilibrium position are small (compared to the length of the thread), the approximate equality is fulfilled. Let's use it in formula (11):
This is an equation of harmonic oscillations of the form (6) in which
Therefore, the cyclic oscillation frequency of a mathematical pendulum is equal to:
. (12)
Hence the period of oscillation of the mathematical pendulum:
. (13)
Please note that formula (13) does not include the mass of the load. Unlike a spring pendulum, the period of oscillation of a mathematical pendulum does not depend on its mass.
Free and forced vibrations.
The system is said to free vibrations, if it is once taken out of the equilibrium position and subsequently left to itself. No periodic external
At the same time, the system does not experience any impacts, and there are no internal sources of energy that support oscillations in the system.
The oscillations of the spring and mathematical pendulums considered above are examples of free oscillations.
The frequency at which free vibrations occur is called natural frequency oscillatory system. Thus, formulas (9) and (12) give the natural (cyclic) oscillation frequencies of the spring and mathematical pendulums.
In an idealized situation in the absence of friction, free oscillations are undamped, that is, they have a constant amplitude and last indefinitely. In real oscillatory systems, friction is always present, so free oscillations gradually damp out (Fig. 6).
Forced vibrations- these are oscillations made by the system under the influence of an external force, periodically changing in time (the so-called driving force).
Suppose that the natural frequency of the system oscillations is , and the driving force depends on time according to the harmonic law:
For some time, forced oscillations are established: the system performs a complex movement, which is a superposition of forced and free oscillations. Free oscillations gradually damp out, and in the steady state the system performs forced oscillations, which also turn out to be harmonic. The frequency of steady forced oscillations coincides with the frequency
driving force (an external force, as it were, imposes its frequency on the system).
The amplitude of steady-state forced oscillations depends on the frequency of the driving force. The graph of this dependence is shown in Fig. 7.
 |
| Rice. 7. Resonance |
We see that resonance occurs near the frequency - the phenomenon of an increase in the amplitude of forced oscillations. The resonant frequency is approximately equal to the natural oscillation frequency of the system: , and this equality is the more accurate, the less friction in the system. In the absence of friction, the resonant frequency coincides with the natural oscillation frequency, , and the oscillation amplitude increases to infinity at .


