The concept of mass and momentum of a body. Their properties. Introduction of the concept of force as a measure of the interaction of bodies. Force properties. The principle of superposition. Forces in mechanics.
Weight - a scalar physical quantity, one of the most important quantities in physics. Initially, it characterized the "amount of matter" in a physical object. Mass is a measure of the inertia of a body. Mass is additive and invariant under frame change
Pulse (Number of motion) - a vector physical quantity, which is a measure of the mechanical movement of the body. In classical mechanics, the momentum of a body is equal to the product of the mass m of this body and its speed v, the direction of the momentum coincides with the direction of the velocity vector: . can only be positive or zero.
Force - Force - a vector quantity that characterizes the mechanical action of one body on another, which manifests itself in the deformation of the body in question and the change in its movement relative to other bodies. The force is characterized by module and direction. The modulus and direction of the force do not depend on the choice of reference system. Ways to measure force: dynamometer. unit of measurement forces in SI - 1 N.
Power properties:
1. Force is a function of the speed and position of a material point.
F= f((Vx;Vy;Vz), x, y, z).
2. The force with which one particle acts on another depends on the R vectors and the velocities of only these two particles; the presence of other particles does not affect this force. This property of force is called the principle of pair interaction. The consequence of it is called the principle of superposition. 3. Newton's 3rd law - the force of action is equal to the force of reaction
Superposition principle - one of the most general laws in many branches of physics. In its simplest formulation, the superposition principle says: “the result of the action of several external forces on a particle is the vector sum of the action of these forces” (The interaction between two particles does not change when a third particle is introduced, which also interacts with the first two.)
Forces in mechanics: 1) The force of gravity, gravitational. . 2) Force of elasticity, electromagnetic. .
3) Force of friction, dry, liquid. electromagnetic.
Newton's laws of classical mechanics. Conditions for the applicability of Newton's laws. The basic law of the classical dynamics of a material point. Solution of the main problem of dynamics.
Newton's first law : any material point (body) retains a state of rest or uniform rectilinear motion until the impact from other bodies makes it change this state. The property of a body to maintain its state is called inertia. Therefore, Newton's first law is called the law of inertia.
Newton's second law : acceleration acquired by a material point or body, proportional to the force causing it, coincides with it in direction and inversely proportional to the mass of the material point (body).
Newton's third law : Action equals reaction: F = -F.
Conditions for the applicability of Newton's laws : In inertial frames of reference and when moving at speeds much less than the speed of light.
Basic law of classical MT dynamics - The mass of moving relativistic particles depends on their speed:
where m0 is the rest mass of the particle, i.e., the mass measured in that inertial frame of reference relative to which the particle is at rest; c is the speed of light in vacuum; m is the mass of the particle in the frame of reference relative to which it moves with the speed v. Consequently, the mass of the same particle is different in different inertial frames of reference.
Solution of the main problem of dynamics –
1) Knowing the mass of the point and its movement, find the forces acting on the point or their resultant.
1. Compose differential equations
2. Based on the known motion of a material point, find the projections of acceleration on the coordinate axes that are selected for compiling differential equations.
3. Substituting the acceleration projections into the differential equations, find the projections of the resultant forces applied to the point.
4. Using additional conditions, for example, the direction of the reactions of bonds, determine the resultant force applied to the point. If one force acts on a point, then formulas (1) - (3) obtained for the resultant can be used to find the magnitude and direction of this force.
5. Analyze the resulting solution.
2) Knowing the forces applied to the point, as well as its mass, determine its movement, described by kinematic equations.
1. Compose differential equations for a specific case of motion of a material point
2. Determine and write down the initial conditions of the problem.
3. Integrate differential equations in accordance with the methods known from the course of mathematics, determining the constants of integration using the initial conditions, in order to find a unique solution.
4. Analyze the law of motion of a material point obtained in the solution depending on specific questions in the problem and find answers to them.
5. A system of material points is such a set of them in which the position and movement of each point depends on the position and movement of all points of this system.
What interactions are fundamental? At what distances do fundamental interactions manifest themselves? What is the relative intensity of fundamental interactions?
Fundamental influences
1) weak (less than 10 -15) intensity - 10 -13
2) strong (less than 10 -15) intensity - 1
3) Electrostatic (from 0 to late) intensity - 10 -2
4) Gravitational (from 0 to late) intensity - 10 -38
Determination of the angular momentum of a material point and the moment of force. Projection of vectors of angular momentum and moment of force on the selected axis Equation of moments for a material point. Under what conditions is the angular momentum of a material point conserved?
Moment of power - a vector physical quantity equal to the product of the radius vector drawn from the axis of rotation to the point of application of the force by the vector of this force. Characterizes the rotational action of force on a rigid body.
angular momentum material point BUTrelative to a fixed point O called the physical quantity determined by the vector product:
L= = ,
where r is the radius vector drawn from the point O exactly BUT; p = mv- momentum
The vector will is directed along the normal to the plane formed by the vectors and , the direction of which is determined by the gimlet rule.
Save condition - remains constant until external forces act on the system
5. System of material points. Derivation of the equation of motion of a system of material points on the example of two rigidly connected bodies (xs)
System of material points such a set of them is called in which the position and movement of each point depends on the position and movement of all points of the given system. Often a system of material points is called a mechanical system.
The center of mass of the system of material points. Determination of the radius vector of the center of mass. properties of the center of mass. Center of mass speed. Derivation of the equation of motion of the center of mass. The law of conservation of the coordinates of the center of mass of the system of material points.
trom of mass (or center of inertia)
system of material points calls-
imaginary point C, position
which characterizes the distribution
the mass of this system. Its radius vector
The center of mass of a closed system either moves in a straight line and uniformly, or remains stationary.
Center of mass speed
For a continuous mass distribution with density r ![]() . If the forces of gravity applied to each particle of the system are directed one way, then the center of mass coincides with the center of gravity. But if not parallel, then the center of mass and the center of gravity do not coincide.
. If the forces of gravity applied to each particle of the system are directed one way, then the center of mass coincides with the center of gravity. But if not parallel, then the center of mass and the center of gravity do not coincide.
Taking the time derivative of , we get: ![]()
those. the total momentum of the system is equal to the product of its mass and the velocity of the center of mass.
Substituting this expression into the law of change of the total momentum, we find: ![]()
The center of mass of the system moves as a particle in which the entire mass of the system is concentrated and to which the resulting external forces.
At progressive motion, all points of a rigid body move in the same way as the center of mass (along the same trajectories), therefore, to describe translational motion, it is enough to write down and solve the equation of motion of the center of mass.
Since , then the center of mass closed system must maintain a state of rest or uniform rectilinear motion, i.e. = const. But at the same time, the entire system can rotate, scatter, explode, etc. as a result of action internal forces.
Rс(t1) = Rc(t2) conservation law of the center of mass coordinates
8. The work of potential (conservative) forces on the example of gravity. Determination of potential (conservative) force fields. Introduction of the concept of potential energy through the work of force. Relationship between force and potential energy
Potential force is a force whose work depends only on the initial and final position of the point of its application and does not depend either on the type of trajectory or on the law of motion of this point. Conservative forces are those forces whose work on any closed trajectory is equal to 0.
Potential (conservative) force field: A potential field is called, the work of which, when moving from one point of the field to another, does not depend on the shape of the trajectory. Potential are the gravity field and the electrostatic field.
Introduction of the concept of potential. Energy through the work of forces - Potential energy is a scalar physical quantity that characterizes the energy reserve of a certain body (or material point) located in a potential force field, which is used to acquire (change) the kinetic energy of the body due to the work of the field forces.
Connection of force and potential energy - Each point of the potential field corresponds to a certain value of the force acting on the body, and a certain value of the potential energy U. This means that there must be a connection between the force and U, on the other hand, dA \u003d -dU,
Mechanics of an absolutely rigid body.
1 Model of an absolutely rigid body (definition). The equation of motion of ATT on
example of two rigidly connected material points rotating around an axis. Introduction of the concept of moment of inertia.
In mechanics, another model is introduced -
absolutely rigid body. Absolutely
a solid is a body that is neither
under what conditions cannot deform
rovatsya and under all conditions of distance
between two points (or more precisely
between two particles) of this body os-
lurks constant.
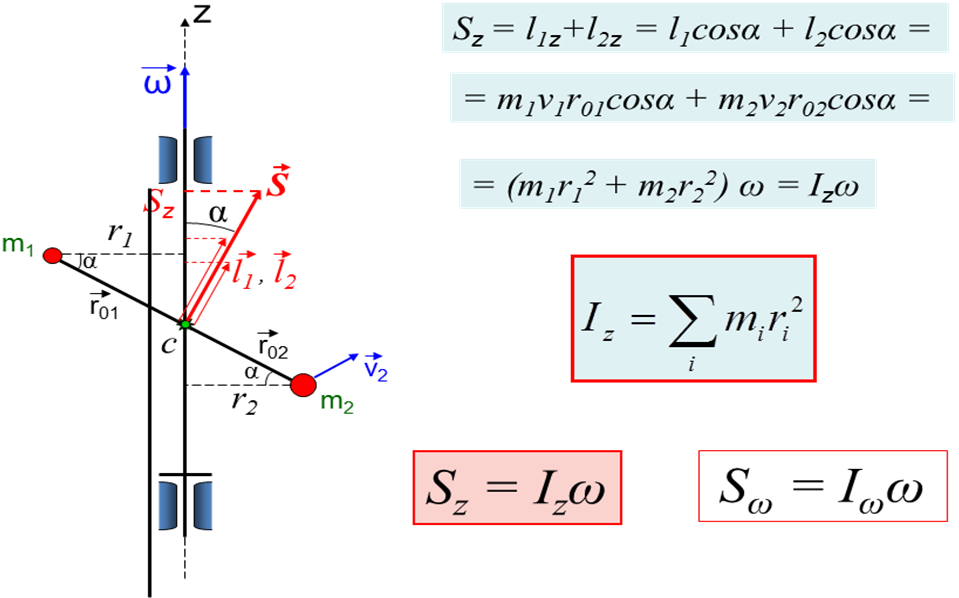
2 Application of the moment of inertia ATT during rotational motion. His physical