III. Trajectory, path and displacement
The position of a material point is determined in relation to some other, arbitrarily chosen body, called reference body. Contacts him frame of reference- a set of coordinate systems and clocks associated with the body of reference.
In the Cartesian coordinate system, the position of point A at a given moment of time with respect to this system is characterized by three coordinates x, y and z or a radius vector r – a vector drawn from the origin of the coordinate system to a given point. When a material point moves, its coordinates change over time. r=r(t) or x=x(t), y=y(t), z=z(t) – kinematic equations of a material point.
The main task of mechanics– knowing the state of the system at some initial time t 0 , as well as the laws governing the movement, determine the state of the system at all subsequent times t.
Trajectory motion of a material point - a line described by this point in space. Depending on the shape of the trajectory, there are rectilinear And curvilinear point movement. If the trajectory of the point is a plane curve, i.e. lies entirely in one plane, then the movement of the point is called flat.
The length of the section of the trajectory AB, passed by a material point from the moment the time began, is called path lengthΔs and is a scalar function of time: Δs=Δs(t). Unit of measurement - meter(m) is the length of the path traveled by light in vacuum in 1/299792458 s.
IV. Vector way to define motion
Radius vector r – a vector drawn from the origin of the coordinate system to a given point. Vector ∆ r=r-r 0 , drawn from the initial position of the moving point to its position at a given time is called moving(increment of the radius-vector of the point for the considered period of time).
Average speed vector< v> called increment ratio Δ r radius-vector of a point to the time interval Δt: (1). The direction of the average velocity coincides with the direction Δ r.With an unlimited decrease in Δt, the average speed tends to the limit value, which is called instant speedv. Instantaneous speed is the speed of the body at a given time and at a given point in the trajectory: (2). Instant Speed v is a vector quantity equal to the first derivative of the radius-vector of the moving point with respect to time.
To characterize the rate of change of speed v point in mechanics, a vector physical quantity is introduced, called acceleration.
Average acceleration non-uniform movement in the interval from t to t + Δt is called a vector quantity equal to the ratio of the change in speed Δ v to the time interval Δt:
Instantaneous acceleration a material point at time t will be the limit of the average acceleration: (4). Acceleration but is a vector quantity equal to the first derivative of the velocity with respect to time.
V. Coordinate method of motion assignment
The position of the point M can be characterized by the radius - the vector r or three coordinates x, y and z: M(x, y, z). The radius - vector can be represented as the sum of three vectors directed along the coordinate axes: (5).
From the definition of speed ![]() (6). Comparing (5) and (6) we have: (7). Given (7), formula (6) can be written (8). The speed modulus can be found:(9).
(6). Comparing (5) and (6) we have: (7). Given (7), formula (6) can be written (8). The speed modulus can be found:(9).
Similarly for the acceleration vector:
![]() (10),
(10),
![]() (11),
(11),
Natural way of specifying motion (description of motion using trajectory parameters)
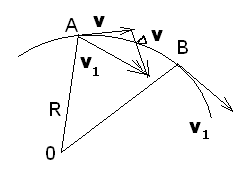
The movement is described by the formula s=s(t). Each point of the trajectory is characterized by its value s. Radius - the vector is a function of s and the trajectory can be given by the equation r=r(s). Then r=r(t) can be represented as a complex function r. Let us differentiate (14). The value Δs is the distance between two points along the trajectory, |Δ r| is the distance between them in a straight line. As the points get closer, the difference decreases. , where τ
is the unit vector tangent to the trajectory. , then (13) has the form v=τ
v(15). Therefore, the speed is directed tangentially to the trajectory. 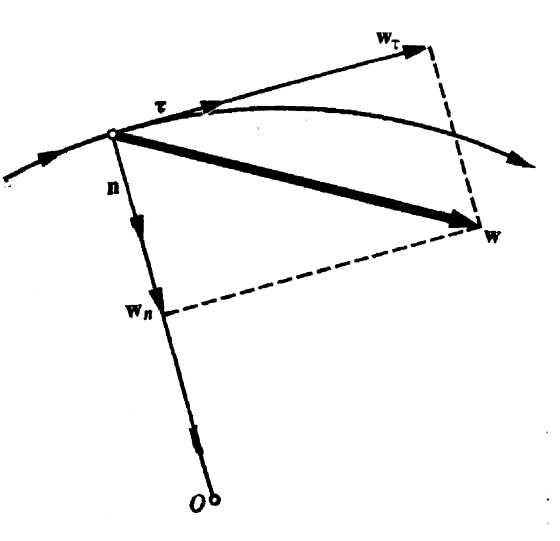
Acceleration can be directed at any angle to the tangent to the motion path. From the definition of acceleration ![]() (16). If τ
- tangent to the trajectory, then - vector perpendicular to this tangent, i.e. directed along the normal. The unit vector, in the direction of the normal is denoted n. The value of the vector is 1/R, where R is the radius of curvature of the trajectory.
(16). If τ
- tangent to the trajectory, then - vector perpendicular to this tangent, i.e. directed along the normal. The unit vector, in the direction of the normal is denoted n. The value of the vector is 1/R, where R is the radius of curvature of the trajectory.
Point away from the path at a distance and R in the direction of the normal n, is called the center of curvature of the trajectory. Then (17). Given the above, formula (16) can be written: ![]() (18).
(18).
The total acceleration consists of two mutually perpendicular vectors: , directed along the trajectory of motion and called tangential, and acceleration directed perpendicular to the trajectory along the normal, i.e. to the center of curvature of the trajectory and is called normal.
We find the absolute value of the total acceleration: ![]() (19).
(19).
Lecture 2 Movement of a material point along a circle. Angular displacement, angular velocity, angular acceleration. Relationship between linear and angular kinematic quantities. Vectors of angular velocity and acceleration.
Lecture plan
Kinematics of rotary motion
During rotational motion, the vector dφ elementary rotation of the body. Elementary turns
(denoted or) can be seen as pseudovectors (as it were).
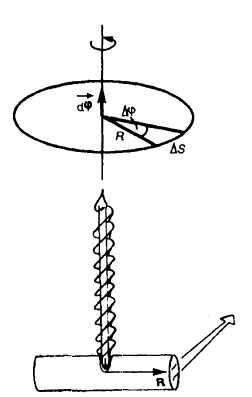
Angular movement - vector quantity, the module of which is equal to the angle of rotation, and the direction coincides with the direction of translational motion right screw (directed along the axis of rotation so that when viewed from its end, the rotation of the body seems to be counterclockwise). The unit of angular displacement is rad.
The rate of change in angular displacement over time is characterized by angular velocity
ω
. The angular velocity of a rigid body is a vector physical quantity that characterizes the rate of change in the angular displacement of the body over time and is equal to the angular displacement performed by the body per unit time: 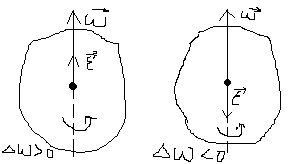
Directed vector ω along the axis of rotation in the same direction as dφ (according to the rule of the right screw). Unit of angular velocity - rad/s
The rate of change of the angular velocity over time is characterized by angular acceleration ε
(2).
The vector ε is directed along the rotation axis in the same direction as dω, i.e. at accelerated rotation, at slow rotation.
The unit of angular acceleration is rad/s 2 .
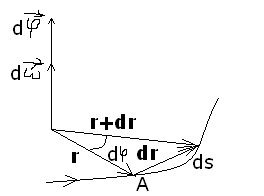
During dt arbitrary point of the rigid body A move to dr, passing the way ds. It can be seen from the figure that dr equal to the vector product of the angular displacement dφ by radius – point vector r : dr =[ dφ · r ] (3).
Point Linear Speed is related to the angular velocity and radius of the trajectory by the relation: 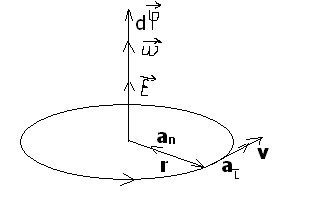
In vector form, the formula for linear velocity can be written as vector product: (4)
By definition of a vector product its modulus is , where is the angle between the vectors and, and the direction coincides with the direction of the translational motion of the right screw when it rotates from to .
Differentiate (4) with respect to time:
Considering that - linear acceleration, - angular acceleration, and - linear speed, we get:
The first vector on the right side is directed tangentially to the point trajectory. It characterizes the change in the linear velocity modulus. Therefore, this vector is the tangential acceleration of the point: a τ =[ ε · r ] (7). The tangential acceleration modulus is a τ = ε · r. The second vector in (6) is directed towards the center of the circle and characterizes the change in the direction of the linear velocity. This vector is the normal acceleration of the point: a n =[ ω · v ] (8). Its modulus is equal to a n =ω v or given that v = ω· r, a n = ω 2 · r = v 2 / r (9).
Particular cases of rotational motion
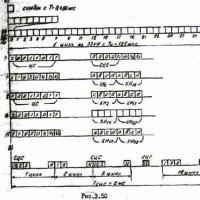
With uniform rotation: , Consequently .
Uniform rotation can be characterized rotation period T- the time it takes for a point to make one complete revolution,
Rotation frequency - the number of complete revolutions made by the body during its uniform motion in a circle, per unit time: (11)
Speed unit - hertz (Hz).
With uniformly accelerated rotational motion :
Lecture 3 Newton's first law. Strength. The principle of independence of acting forces. resultant force. Weight. Newton's second law. Pulse. Law of conservation of momentum. Newton's third law. Moment of momentum of a material point, moment of force, moment of inertia.
Lecture plan
Newton's first law
Newton's second law
Newton's third law
Moment of momentum of a material point, moment of force, moment of inertia
Newton's first law. Weight. Strength
Newton's first law: There are frames of reference relative to which bodies move in a straight line and uniformly or are at rest if no forces act on them or the action of forces is compensated.
Newton's first law is valid only in an inertial frame of reference and asserts the existence of an inertial frame of reference.
Inertia- this is the property of bodies to strive to keep the speed unchanged.
inertia called the property of bodies to prevent a change in speed under the action of an applied force.
Body mass is a physical quantity that is a quantitative measure of inertia, it is a scalar additive quantity. Mass additivity consists in the fact that the mass of a system of bodies is always equal to the sum of the masses of each body separately. Weight is the basic unit of the SI system.
One form of interaction is mechanical interaction. Mechanical interaction causes deformation of bodies, as well as a change in their speed.
Strength- this is a vector quantity that is a measure of the mechanical impact on the body from other bodies, or fields, as a result of which the body acquires acceleration or changes its shape and size (deforms). Force is characterized by module, direction of action, point of application to the body.