Clasificarea perechilor cinematice. Există mai multe clasificări ale perechilor cinematice. Perechile cinematice în corpul uman Se numește o pereche cinematică cu cinci legături
O pereche cinematică este o conexiune mobilă a două legături învecinate care le asigură o anumită mișcare relativă. Elementele unei perechi cinematice sunt un set de suprafețe de linii sau puncte de-a lungul cărora are loc o conexiune mobilă a două legături și care formează o pereche cinematică. Pentru ca o pereche să existe, elementele legăturilor sale constitutive trebuie să fie în contact constant T.
Distribuiți munca pe rețelele sociale
Dacă această lucrare nu vă convine, există o listă de lucrări similare în partea de jos a paginii. De asemenea, puteți utiliza butonul de căutare
Cursul 2
Oricare ar fi mecanismul mașinii, acesta constă întotdeauna numai din legături și perechi cinematice.
Condițiile de conectare impuse în mecanismele pe verigile mobile, în teoria mașinilor și a mecanismelor Se obișnuiește să se numească perechi cinematice.
Cuplu cinematicnumită conexiune mobilă a două legături învecinate, asigurându-le o anumită mișcare relativă.
În tabel. 2.1 prezintă denumirile, desenele, simbolurile celor mai comune perechi cinematice în practică, precum și clasificarea acestora.
Legăturile, atunci când sunt combinate într-o pereche cinematică, pot intra în contact unele cu altele de-a lungul suprafețelor, liniilor și punctelor.
Elementele unei perechi cinematiceei numesc un set de Suprafețe, linii sau puncte de-a lungul cărora are loc o legătură mobilă a două legături și care formează o Pereche cinematică. În funcție de tipul de contact al elementelor perechilor cinematice, există mai sus și mai jos perechi cinematice.
Se numesc perechi cinematice formate din elemente sub forma unei linii sau a unui punct mai sus .
Se numesc perechi cinematice formate din elemente sub formă de suprafețe inferior.
Pentru ca o pereche să existe, elementele legăturilor sale constitutive trebuie să fie în contact constant, adică. fi închis. Închiderea perechilor cinematice poate figeometric sau cu forță, De exemplu, cu ajutorul propriei mase, arcuri etc.
Rezistența, rezistența la uzură și durabilitatea perechilor cinematice depind de tipul și designul acestora. Perechile inferioare sunt mai rezistente la uzură decât cele superioare. Acest lucru se explică prin faptul că, în perechile inferioare, contactul elementelor perechilor are loc de-a lungul suprafeței și, prin urmare, cu aceeași sarcină, în ea apar presiuni specifice mai mici decât în cea superioară. Uzura, ceteris paribus, este proporțională cu presiunea specifică și, prin urmare, Perechile inferioare se uzează Mai lent decât cele superioare. Prin urmare, pentru a reduce uzura mașinilor, este de preferat să se utilizeze perechi inferioare, totuși, adesea, utilizarea perechilor cinematice superioare face posibilă simplificarea semnificativă a diagramelor structurale ale mașinilor, ceea ce reduce dimensiunile acestora și simplifică proiectarea. Prin urmare, alegerea corectă a perechilor cinematice este o problemă complexă de inginerie.
Perechile cinematice sunt, de asemenea, împărțite lanumărul de grade de libertate(mobilitate), pe care îl pune la dispoziția legăturilor conectate prin intermediul acestuia, saunumărul de condiții de legătură(clasa de perechi), impuse de pereche asupra mișcării relative a legăturilor legate. Atunci când folosesc o astfel de clasificare, dezvoltatorii de mașini primesc informații despre posibilele mișcări relative ale legăturilor și despre natura interacțiunii factorilor de forță dintre elementele unei perechi.
Un link gratuit care este în cazul general în M - spaţiu dimensional, permiţând P tipuri de mișcări cele mai simple, are un număr de grade de libertate! ( H) sau W - mobil.
Deci, dacă legătura este în spațiu tridimensional, permițând șase tipuri de mișcări simple - trei de rotație și trei de translație în jurul și de-a lungul axelor X, V, Z , atunci spunem că are șase grade de libertate, sau are șase coordonate generalizate, sau este șase mobilă. Dacă legătura se află într-un spațiu bidimensional care permite trei tipuri de mișcări simple - o rotație în jur Z și două translaționale de-a lungul axelor X și Y , apoi se spune că are trei grade de libertate, sau trei coordonate generalizate, sau este tri-mobilă etc.
Tabelul 2.1
Când legăturile sunt combinate folosind perechi cinematice, ele își pierd gradele de libertate. Aceasta înseamnă că perechile cinematice impun legăturilor pe care le conectează printr-un număr S.
În funcție de numărul de grade de libertate pe care legăturile combinate într-o pereche cinematică le au în mișcare relativă, se determină mobilitatea perechii ( L = H ). Dacă H este numărul de grade de libertate ale legăturilor perechii cinematice în mișcare relativă, la mobilitatea perechilor este determinată după cum urmează:
unde P - mobilitatea spatiului in care exista perechea luata in considerare; S - numarul de obligatiuni impuse de pereche.
Trebuie remarcat faptul că mobilitatea unei perechi W , definit de (2.1), nu depinde de tipul de spațiu în care este implementat, ci doar de construcție.
De exemplu, o pereche de rotație (translațională) (a se vedea tabelul 2.1), atât în spațiu mobil de șase, cât și de trei, va rămâne în continuare unică mobilă, în primul caz îi vor fi impuse 5 legături, iar în al doilea caz - 2 legături, și, deci vom avea, respectiv:
pentru șase spațiu mobil:
pentru un spațiu mobil cu trei:
După cum puteți vedea, mobilitatea perechilor cinematice nu depinde de caracteristicile spațiului, ceea ce este un avantaj al acestei clasificări. Dimpotrivă, împărțirea frecventă a perechilor cinematice în clase are de suferit din cauza faptului că clasa unei perechi depinde de Caracteristicile spațiului, ceea ce înseamnă că aceeași pereche în spații diferite are o clasă diferită. Acest lucru este incomod pentru scopuri practice, ceea ce înseamnă că o astfel de clasificare a perechilor cinematice este irațională, deci este mai bine să nu o folosiți.
Este posibil să alegeți o astfel de formă a elementelor unei perechi, astfel încât, cu o mișcare elementară independentă, să apară o a doua - un dependent (derivat). Un exemplu de astfel de pereche cinematică este un șurub (Tabelul 2. 1) . În această pereche, mișcarea de rotație a șurubului (piuliță) determină mișcarea de translație a acestuia (ei) de-a lungul axei. O astfel de pereche ar trebui să fie atribuită uneia cu o singură mișcare, deoarece în ea se realizează doar o singură mișcare independentă, cea mai simplă.
Conexiuni cinematice.
Perechile cinematice date în tabel. 2.1, simplu și compact. Ele implementează aproape toate cele mai simple mișcări relative ale legăturilor necesare pentru crearea mecanismelor. Cu toate acestea, atunci când se creează mașini și mecanisme, acestea sunt rareori utilizate. Acest lucru se datorează faptului că forțe mari de frecare apar de obicei în punctele de contact ale legăturilor care formează o pereche. Acest lucru duce la uzura semnificativă a elementelor perechii și, prin urmare, la distrugerea acesteia. Prin urmare, cel mai simplu lanț cinematic cu două legături al unei perechi cinematice este adesea înlocuit cu lanțuri cinematice mai lungi, care împreună implementează aceeași mișcare relativă a legăturilor ca și perechea cinematică înlocuită.
Un lanț cinematic conceput pentru a înlocui o pereche cinematică se numește conexiune cinematică.
Să dăm exemple de lanțuri cinematice, pentru cele mai comune în practică perechile cinematice rotaționale, translaționale, elicoidale, sferice și plan-plan.
Din Tabel. 2.1 se poate observa că cel mai simplu analog al unei perechi cinematice rotative este un rulment cu elemente de rulare. De asemenea, ghidajele cu role înlocuiesc perechea liniară și așa mai departe.
Conexiunile cinematice sunt mai convenabile și mai fiabile în funcționare, rezistă la forțe (momente) mult mai mari și permit mecanismelor să funcționeze la viteze relative mari ale legăturilor.
Principalele tipuri de mecanisme.
Mecanism Poate fi considerat ca un caz special al unui lanț cinematic, în care cel puțin o verigă este transformată într-un rack, iar mișcarea verigilor rămase este determinată de mișcarea specificată a verigilor de intrare.
Trăsăturile distinctive ale lanțului cinematic, reprezentând mecanismul, sunt mobilitatea și siguranța mișcării legăturilor sale față de cremalieră.
Un mecanism poate avea mai multe legături de intrare și o legătură de ieșire, caz în care se numește mecanism de însumare și, invers, o legătură de intrare și mai multe legături de ieșire, atunci se numește mecanism de diferențiere.
Mecanismele sunt împărțite înghidaje și transmisie.
mecanism de transmisienumit un dispozitiv conceput pentru a reproduce o anumită relație funcțională între mișcările legăturilor de intrare și de ieșire.
mecanism de ghidareei numesc un mecanism în care traiectoria unui anumit punct al unei legături care formează perechi cinematice cu numai legături în mișcare coincide cu o curbă dată.
Luați în considerare principalele tipuri de mecanisme care au găsit o aplicare largă în tehnologie.
Se numesc mecanisme ale căror legături formează doar perechile cinematice inferioarepârghie-articulată. Aceste mecanisme sunt utilizate pe scară largă datorită faptului că sunt durabile, fiabile și ușor de operat. Principalul reprezentant al unor astfel de mecanisme este articulația cu patru verigi (Fig. 2.1).

Numele mecanismelor sunt de obicei determinate de numele legăturilor lor de intrare și ieșire sau de legătura caracteristică inclusă în componența lor.
În funcție de legile mișcării legăturilor de intrare și de ieșire, acest mecanism poate fi numit crank-rocker, double crank, dublu rocker, rocker-crank.
Bratul articulat cu patru brațe este utilizat în construcția de mașini-unelte, fabricarea de instrumente, precum și în utilaje agricole, alimentare, plug de zăpadă și alte mașini.

Dacă înlocuim o pereche de rotație într-o articulație cu patru articulații, de exemplu D , la translație, apoi obținem binecunoscutul mecanism manivelă-glider (Fig. 2.2).
Orez. 2.2. Diferite tipuri de mecanisme cu manivelă:
1 - manivelă 2 - biela; 3 - glisor
Mecanismul crank-slider (slider-crank) și-a găsit o aplicație largă în compresoare, pompe, motoare cu ardere internă și alte mașini.
Înlocuirea unei perechi de rotație într-o articulație cu patru articulații DIN la translație, obținem un mecanism basculant (Fig. 2.3).
Pe p și c .2.3, în mecanismul basculant se obține dintr-o articulație cu patru articulații prin înlocuirea perechilor de rotație în acesta Pot face pentru progresiv.

Mecanismele cu balansoar și-au găsit o largă aplicație în mașinile de rindeluit datorită proprietății lor inerente de asimetrie de lucru și de mers în gol. De obicei au o cursă de lucru lungă și o cursă rapidă în gol care asigură revenirea frezei în poziția inițială.
Orez. 2.3. Diferite tipuri de mecanisme balansoare:
1 - manivelă; 2 - piatră; 3 - culise.
Mecanismele balamale-pârghie au găsit o mare utilizare în robotică (Fig. 2.4).
O caracteristică a acestor mecanisme este că au un număr mare de grade de libertate, ceea ce înseamnă că au multe unități. Funcționarea coordonată a antrenărilor legăturilor de intrare asigură deplasarea gripei de-a lungul unei traiectorii raționale și către un loc dat din spațiul înconjurător.

Aplicație pe scară largă în ingineriemecanisme cu came. Cu ajutorul mecanismelor cu came, este din punct de vedere structural cel mai simplu mod de a obține aproape orice mișcare a verigii antrenate conform unei anumite legi,
În prezent, există un număr mare de varietăți de mecanisme cu came, dintre care unele sunt prezentate în Fig. 2.5.

Legea necesară de mișcare a legăturii de ieșire a mecanismului cu came este atinsă dând legătura de intrare (camă) o formă adecvată. Cama poate efectua rotație (Fig. 2.5, a, b ), translațional (Fig. 2.5, c, g ) sau mișcare complexă. Legătura de ieșire, dacă face o mișcare de translație (Fig. 2.5, a, în ), numit împingător, iar dacă se balansează (Fig. 2.5, G ) - rocker. Pentru a reduce pierderile prin frecare în perechea cinematică superioară LA utilizați o rolă de legătură suplimentară (Fig. 2.5, G).
Mecanismele cu came sunt utilizate atât în mașinile de lucru, cât și în diferite tipuri de dispozitive de comandă.

Foarte des, în mașinile de tăiat metale, prese, diverse instrumente și dispozitive de măsurare se folosesc mecanisme cu șurub, dintre care cel mai simplu este prezentat în fig. 2.6:
Orez. 2.6 Mecanism cu șuruburi:
1 - șurub; 2 - nuca; A, B, C - perechi cinematice
Mecanismele cu șurub sunt de obicei folosite acolo unde este necesar să se transforme mișcarea de rotație în mișcare de translație interdependentă sau invers. Interdependența mișcărilor se stabilește prin selectarea corectă a parametrilor geometrici ai perechii de șuruburi LA .
Pană mecanismele (Fig. 2.7) sunt utilizate în diferite tipuri de dispozitive de strângere și dispozitive în care este necesar să se creeze o forță mare de ieșire cu forțe de intrare limitate. O caracteristică distinctivă a acestor mecanisme este simplitatea și fiabilitatea designului.
Mecanismele în care transferul mișcării între corpurile în contact se realizează datorită forțelor de frecare se numesc frecare. Cele mai simple mecanisme de frecare cu trei brațe sunt prezentate în fig. 2.8

Orez. 2.7 Mecanism cu pană:
1, 2 - legături; L, V, C - sărbători cinematice.

Orez. 2.8 Mecanisme de frecare:
A - mecanism de frecare cu axe paralele; b - mecanism de frecare cu axe care se intersectează;în - mecanism de frecare cu cremalieră și pinion; 1 - rola de intrare (roata);
2 – rola de iesire (roata); 2" - șină
Datorită faptului că legăturile 1 și 2 atașate unul de celălalt, de-a lungul liniei de contact dintre ele, ia naștere o forță de frecare, care trage legătura condusă împreună cu ea 2 .
Angrenajele cu frecare sunt utilizate pe scară largă în dispozitive, unități de bandă, variatoare (mecanisme cu control lin al vitezei).
Pentru a transfera mișcarea de rotație conform unei legi date între arbori cu axe paralele, de intersectare și de încrucișare, se folosesc diferite tipuri de angrenaje. mecanisme . Cu ajutorul angrenajelor, este posibil să transferați mișcarea atât între arbori cuaxe fixe, asa cu deplasându-se în spațiu.
Mecanismele angrenate sunt folosite pentru a schimba frecvența și direcția de rotație a legăturii de ieșire, însumarea sau separarea mișcărilor.

Pe fig. 2.9 prezintă principalii reprezentanți ai angrenajelor cu axe fixe.
Fig 2.9. Transmisii cu angrenaje cu axe fixe:
a - cilindric; b - conic; în - sfârșit; g - rack;
1 - angrenaj; 2 - angrenaj; 2 * șină
Cea mai mică dintre cele două angrenaje angrenate se numește unelte și multe altele - roată dințată.
Cremaliera este un caz special al unei roți dințate în care raza de curbură este egală cu infinitul.

Dacă trenul de viteze are angrenaje cu axe mobile, atunci acestea se numesc planetare (Fig. 2.10):
Angrenajele planetare, însă, în comparație cu angrenajele cu axe fixe, permit transferul de putere și rapoarte de transmisie mai mari cu un număr mai mic de viteze. Ele sunt, de asemenea, utilizate pe scară largă în crearea mecanismelor de însumare și diferențială.
Transmiterea mișcărilor între axele care se intersectează se realizează cu ajutorul unui angrenaj melcat (Fig. 2.11).

Un angrenaj melcat se obține dintr-o transmisie șurub-piuliță prin tăierea longitudinală a piuliței și plierea ei de două ori în planuri reciproc perpendiculare. Angrenajul melcat are proprietatea de autofrânare și vă permite să implementați rapoarte mari de transmisie într-o singură etapă.
Orez. 2.11. Unelte melcate:
1 - vierme, 2 - roată melcă.

Mecanismele cu angrenaje cu mișcare intermitentă includ și mecanismul în cruce malteză. Pe fig. З-Л „2. arată mecanismul „crucii malteze” cu patru lame.
Mecanismul „crucii malteze” transformă rotația continuă a parului principal - manivelă 1 cu un felinar 3 în rotația intermitentă a „crucii” 2, felinar 3 intră în şanţul radial al „crucii” fără impact 2 şi o întoarce spre colţul unde z este numărul de caneluri.
Pentru a efectua mișcarea într-o singură direcție, se folosesc mecanisme cu clichet. Figura 2.13 prezintă un mecanism cu clichet, constând dintr-un culbutor 1, o roată cu clichet 3 și clichete 3 și 4.

Când balansezi balansoarul 1 câine legănător 3 conferă rotație roții cu clichet 2 numai la deplasarea culbutorului în sens invers acelor de ceasornic. Pentru a ține roata 2 de la rotația spontană în sensul acelor de ceasornic atunci când culbutorul se mișcă împotriva ceasului, se folosește un clichet de blocare 4 .
Mecanismele malteze și cu clichet sunt utilizate pe scară largă în mașini-unelte și instrumente,
Dacă este necesar să se transfere energie mecanică dintr-un punct al spațiului în altul pe o distanță relativ mare, atunci se folosesc mecanisme cu legături flexibile.
Curele, frânghii, lanțuri, fire, panglici, bile etc. sunt folosite ca verigi flexibile care transmit mișcarea de la unul chiar al mecanismului la altul,
Pe fig. 2.14 prezintă o diagramă bloc a celui mai simplu mecanism cu o legătură flexibilă.
Angrenajele cu legături flexibile sunt utilizate pe scară largă în inginerie mecanică, fabricarea de instrumente și alte industrii.

Cele mai tipice mecanisme simple au fost luate în considerare mai sus. mecanismele sunt, de asemenea, date în Literatură specială, certificate-pa și cărți de referință, de exemplu, cum ar fi.
Formule structurale ale mecanismelor.
Există modele generale în structura (structura) diferitelor mecanisme care raportează numărul de grade de libertate W mecanism cu numărul de legături și numărul și tipul perechilor sale cinematice. Aceste modele sunt numite formule structurale ale mecanismelor.
Pentru mecanismele spațiale, formula lui Malyshev este în prezent cea mai comună, a cărei derivare este următoarea.
Lasă să intre un mecanism cu m legături (inclusiv rack), - numărul de perechi care se mișcă una, două, trei, patru și cinci. Să notăm numărul de legături în mișcare. Dacă toate legăturile în mișcare ar fi corpuri libere, numărul total de grade de libertate ar fi 6 n . Cu toate acestea, fiecare pereche cu o singură mișcare V clasa impune mișcării relative a legăturilor care formează o pereche, 5 legături, fiecare pereche cu două mișcări IV clasa - 4 legături etc. Prin urmare, numărul total de grade de libertate, egal cu șase, va fi redus cu suma
unde este mobilitatea unei perechi cinematice, este numărul de perechi a căror mobilitate este egală cu i . Numărul total de conexiuni suprapuse poate include un anumit număr q conexiuni redundante (repetate) care dublează alte conexiuni fără a reduce mobilitatea mecanismului, ci doar transformându-l într-un sistem static nedeterminat. Prin urmare, numărul de grade de libertate ale mecanismului spațial, egal cu numărul de grade de libertate ale lanțului său cinematic în mișcare în raport cu rack, este determinat de următoarea formulă Malyshev:
sau în stenografie
(2.2)
la , mecanismul este un sistem static determinat; la , un sistem static nedeterminat.
În cazul general, soluția ecuației (2.2) este o problemă dificilă, deoarece este necunoscută W și q ; soluțiile disponibile sunt complexe și nu sunt luate în considerare în această prelegere. Cu toate acestea, într-un caz anume, dacă W , egal cu numărul de coordonate generalizate ale mecanismului, găsite din considerente geometrice, din această formulă puteți găsi numărul de conexiuni redundante (vezi Reshetov L. N. Proiectarea mecanismelor raționale. M.., 1972)
(2.3)
si rezolva problema determinabilitatii statice a mecanismului; sau, știind că mecanismul este determinat static, găsiți (sau verificați) W.
Este important de menționat că formulele structurale nu includ dimensiunile legăturilor, prin urmare, în analiza structurală a mecanismelor, se poate presupune că acestea sunt oricare (în anumite limite). Dacă nu există conexiuni redundante (), asamblarea mecanismului are loc fără deformarea legăturilor, acestea din urmă par să se autoajusteze; prin urmare, astfel de mecanisme se numesc auto-aliniere. Dacă există conexiuni redundante (), atunci asamblarea mecanismului și mișcarea legăturilor sale devin posibile numai atunci când acestea din urmă sunt deformate.
Pentru mecanismele plate fără conexiuni redundante, formula structurală poartă numele lui P. L. Chebyshev, care a propus-o pentru prima dată în 1869 pentru mecanismele cu pârghie cu perechi de rotație și un grad de libertate. În prezent, formula Chebyshev este extinsă la orice mecanism plat și este derivată ținând cont de constrângerile în exces, după cum urmează
Lăsați un mecanism plat cu m legături (inclusiv rack), - numărul de legături mobile, - numărul de perechi inferioare și - numărul de perechi superioare. Dacă toate verigile în mișcare ar fi corpuri libere care fac o mișcare plană, numărul total de grade de libertate ar fi egal cu 3 n . Cu toate acestea, fiecare pereche inferioară impune două legături mișcării relative a legăturilor care formează perechea, lăsând un grad de libertate, iar fiecare pereche superioară impune o legătură, lăsând 2 grade de libertate.
Numărul de legături suprapuse poate include un anumit număr de legături redundante (repetate), a căror eliminare nu crește mobilitatea mecanismului. În consecință, numărul de grade de libertate ale unui mecanism plat, adică numărul de grade de libertate al lanțului său cinematic mobil în raport cu rack, este determinat de următoarea formulă Chebyshev:
(2.4)
Dacă se știe, de aici puteți afla numărul de conexiuni redundante
(2.5)
Indicele „p” ne amintește că vorbim despre un mecanism perfect plat, sau mai precis, despre schema lui plată, deoarece din cauza inexactităților de fabricație, un mecanism plat este într-o oarecare măsură spațial.
Conform formulelor (2.2)-(2.5), se efectuează o analiză structurală a mecanismelor existente și o sinteză a diagramelor structurale ale noilor mecanisme.
Analiza structurală și sinteza mecanismelor.
Influența conexiunilor redundante asupra performanței și fiabilității mașinilor.
După cum sa menționat mai sus, cu dimensiuni arbitrare (în anumite limite) ale legăturilor, un mecanism cu legături redundante () nu poate fi asamblat fără deformarea legăturilor. Prin urmare, astfel de mecanisme necesită o precizie sporită de fabricație, în caz contrar, în timpul procesului de asamblare, legăturile mecanismului sunt deformate, ceea ce determină încărcarea perechilor și legăturilor cinematice cu forțe suplimentare semnificative (în plus față de acele forțe externe principale pentru care mecanismul este destinat a fi transmis). Cu o precizie insuficientă în fabricarea unui mecanism cu legături excesive, frecarea în perechile cinematice poate crește foarte mult și poate duce la blocarea legăturilor, prin urmare, din acest punct de vedere, legăturile excesive în mecanisme sunt nedorite.
În ceea ce privește verigile redundante din lanțurile cinematice ale mecanismului, atunci când se proiectează mașini, acestea ar trebui eliminate sau lăsate la o cantitate minimă dacă eliminarea lor completă se dovedește a fi neprofitabilă din cauza complexității designului sau din alte motive. În cazul general, trebuie căutată soluția optimă, ținând cont de disponibilitatea echipamentului tehnologic necesar, costul de producție, durata de viață necesară și fiabilitatea mașinii. Prin urmare, aceasta este o sarcină foarte dificilă pentru fiecare caz specific.
Vom lua în considerare metodologia de determinare și eliminare a legăturilor redundante în lanțurile cinematice ale mecanismelor folosind exemple.
Să fie un mecanism plat cu patru brațe cu patru perechi de rotație cu o singură mișcare (Fig. 2.15, A ) din cauza inexactităților de fabricație (de exemplu, din cauza neparalelismului axelor A și D ) s-a dovedit a fi spațială. Asamblarea lanțurilor cinematice 4, 3, 2 și separat 4, 1 nu provoaca dificultati, ci puncte B, B' poate fi plasat pe ax X . Cu toate acestea, pentru a asambla o pereche rotativă LA , format din linkuri 1 și 2 , va fi posibil doar prin combinarea sistemelor de coordonate Bxyz și B ’ x ’ y ’ z ’ , care necesită o deplasare liniară (deformare) a punctului Legătura B’ 2 de-a lungul axei x şi deformaţii unghiulare ale verigii 2 în jurul axelor x și z (indicat prin săgeți). Aceasta înseamnă că există trei legături redundante în mecanism, ceea ce este confirmat și de formula (2.3): . Pentru ca acest mecanism spațial să fie determinabil static, este necesară cealaltă schemă structurală a acestuia, de exemplu, prezentată în Fig. 2.15, b , unde Asamblarea unui astfel de mecanism se va face fără etanșeitate, de la alinierea punctelor B și B' va fi posibil prin mutarea punctului DIN într-o pereche cilindrică.
Este posibilă o variantă a mecanismului (Fig. 2.15,în ) cu două perechi sferice (); În acest caz, în afară demobilitatea de bazăapare mecanismulmobilitatea locală- capacitatea de a roti biela 2 în jurul axei sale soare ; această mobilitate nu afectează legea de bază a mișcării mecanismului și poate fi chiar utilă în ceea ce privește nivelarea uzurii balamalelor: biela 2 în timpul funcționării mecanismului, acesta se poate roti în jurul axei sale din cauza sarcinilor dinamice. Formula Malyshev confirmă că un astfel de mecanism va fi determinat static:

Orez. 2.15
Cea mai simplă și eficientă modalitate de a elimina conexiunile redundante în mecanismele dispozitivelor este utilizarea unei perechi superioare cu contact punctual în locul unei legături cu două perechi inferioare; gradul de mobilitate al mecanismului plat în acest caz nu se modifică, deoarece, conform formulei Chebyshev (la):
Pe fig. 2.16, a, b, c este dat un exemplu de eliminare a legăturilor redundante într-un mecanism cu came cu un împingător cu role care se mișcă progresiv. Mecanism (Fig. 2.16, A ) - patru verigi (); cu excepția mobilității principale (rotația camei 1
) există mobilitate locală (rotirea independentă a unei role cilindrice rotunde 3
în jurul axei sale) Prin urmare, . Schema plată nu are conexiuni redundante (mecanismul este asamblat fără interferențe). Dacă, din cauza inexactităților în producție, mecanismul este considerat spațial, atunci cu contact liniar al rolei 3 cu came 1 conform formulei lui Malyshev la , obținem, dar într-o anumită condiție. Pereche cinematică cilindru - cilindru (Fig. 2.16, 6
) când rotația relativă a legăturilor este imposibilă 1, 3 în jurul axei z ar fi o pereche tripartită. Dacă o astfel de rotație, din cauza inexactităților în fabricație, are loc, dar este mică, iar contactul liniar este practic păstrat (în timpul încărcării, patch-ul de contact este aproape de formă dreptunghiulară), atunci aceasta 
perechea cinematică va fi deci patru-mobilă și
Fig.2.17
Reducerea clasei celei mai înalte perechi prin utilizarea unei role în formă de butoi (pereche cu cinci mișcări cu contact punctual, Fig. 2.16,în ), obținem pentru și - mecanismul este determinat static. Cu toate acestea, trebuie amintit că contactul liniar al legăturilor, deși necesită o precizie sporită de fabricație, vă permite să transferați sarcini mai mari decât contactul punctual.
În Fig. 2.16, d, e un alt exemplu este dat de eliminarea conexiunilor redundante într-un angrenaj cu patru brațe (, contactul dinților roților 1, 2 și 2, 3 - liniară). În acest caz, conform formulei Chebyshev, - schema plată nu are conexiuni redundante; conform formulei Malyshev, mecanismul este static nedeterminat, prin urmare, va fi necesară o precizie ridicată de fabricație, în special, pentru a asigura paralelismul axelor geometrice ale tuturor celor trei roți.
Înlocuirea dinților de rulare 2 în formă de butoi (Fig. 2.16, d ), obținem un mecanism determinat static.
Unu la unu cu inamicul [școala rusă de luptă corp la corp] Kadochnikov Alexey Alekseevich
Perechile cinematice în corpul uman
Perechile cinematice utilizate în tehnologie și comune în natură au o diferență fundamental importantă.
În mecanismele tehnice, perechile cinematice sunt de obicei aranjate în așa fel încât sunt posibile doar mișcări plane destul de definite, predeterminate.
Perechile cinematice din corpul uman sunt conexiuni mobile ale două legături osoase, care asigură mișcările lor spațiale arbitrare. Posibilitățile de mișcare ale articulațiilor cinematice sunt determinate de structura scheletică a corpului și de acțiunea de control a mușchilor.
Perechile cinematice din corpul uman sunt de obicei numite biocinematice. Dintre toate perechile biocinematice din studiul acțiunilor motorii umane, specialiștii sunt interesați în primul rând de membrele superioare și inferioare ale corpului, care, conform clasificării acceptate, sunt cele mai joase perechi cinematice de rotație.
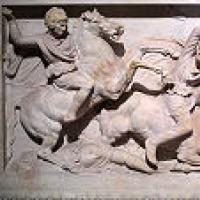
Orez. 17
Pe fig. 17 prezintă un model cinematic al membrului superior uman. Rotulă 1 pereche biocinematică este conectată cu trunchiul; legăturile perechii sunt interconectate printr-o balama cilindrică 2. Perechile biocinematice spațiale de membre pot fi închise sau deschise. Au conexiuni permanente și temporare, care determină câte și ce grade de libertate are perechea dată luată în considerare. Astfel, mișcările brațului ca pereche biocinematică deschisă (Fig. 18a) sunt limitate de articulația umărului, care exclude mișcările liniare ale umărului 1 în raport cu corp.
Orientarea brațului în orice moment al mișcării sale spațiale față de corp poate fi descrisă prin cinci parametri. Coordonatele x A , y A , z A (Fig. 18b) determină poziția umărului 1, poziția antebrațului 2 față de umăr este dată de unghi? 2, rotația antebrațului în jurul propriei axe - un unghi? 2.
Rotirea unghiului? 2 poate fi ignorat, deoarece nu afectează orientarea mâinii în ansamblu. Cu presupunerea făcută, este evident că mâna omului în cazul general are patru grade de libertate.
Numărul real de grade de libertate ale brațului depinde de orientarea acestuia în spațiu și este limitat de limitele de mobilitate ale articulațiilor umărului și cotului.

Orez. optsprezece
Acest text este o piesă introductivă. Din cartea Barbat si femeie: Arta iubirii autoarea Enikeeva Dilya Din cartea Unu la unu cu inamicul [Școala rusă de luptă corp la corp] autor Kadochnikov Alexey AlekseeviciPerechi cinematice Un sistem mecanic creat artificial de corpuri proiectat să transforme mișcarea se numește mecanism. Caracteristica principală a oricărui mecanism este siguranța mișcării părților sale. Pentru ca orice corp să se miște
Din cartea O creștere semnificativă a volumului brațului în șase săptămâni autorul Darden EPerechi cinematice plate Se numește perechi cinematice plate, toate punctele ale căror legături se mișcă în mișcare relativă într-unul sau planuri paralele Perechile cinematice plate sunt cele mai utilizate în tehnologie; sunt mai usoare pentru ca
Din cartea Arta chineză a manevrării sabiei. Un ghid pentru tai chi jian de Yun ZhangPerechi cinematice spațiale O pereche cinematică de pe fiecare dintre axele de coordonate se numește spațială dacă toate punctele legăturilor sale în mișcare relativă descriu curbe spațiale. În orice moment al mișcării spațiale, poziția unui individ.
Din cartea cu cartonaș roșu într-un punct slab autor Epstein ArnoldCinematica mișcărilor umane În biomecanică, cinematica mișcărilor este înțeleasă ca „geometrie”, adică forma spațială a mișcărilor umane fără a ține cont de masa și forțele sale care acționează. Cinematica oferă, în ansamblu, doar o imagine exterioară a mișcărilor. Cauze și
Din cartea Tutorial de pescuit sub apă despre ținerea respirației de Bardi MarcoNivel uman O altă trăsătură care mi-a plăcut la Ed Robinson a apărut imediat după întâlnirea noastră. Ne-am așezat în sala de sport și am vorbit despre unele dintre măsurători și poze pe care speram să le fac în ziua aceea. De exemplu, am vrut să măsoare cu atenție,
Din cartea Teoria și metodele tragerilor (părțile 1-3) autorul Kozhurkin A.N. Din cartea Succes sau gândire pozitivă autor Bogaciov Filip Olegovich6. ÎN NUMELE OMULUI, PENTRU BENEFICIILE OMULUI „Și eu îl cunosc pe acest om!” - Uneori vreau să exclam să potrivesc eroul uneia dintre glumele nordului în timpul altor meciuri, când suporterii pot fi numărați cu degetele.De fapt, desigur, suntem mai mulți. De multe ori mai mult. La urma urmei, nu
Din cartea Cum să învingi orice adversar în situații de urgență. Secretele forțelor speciale autor Kashin Serghei PavloviciNatura acvatică a unei persoane Una dintre principalele calități care caracterizează un scafandru bun este nivelul de adaptare a acestuia la mediul acvatic, de fapt, nivelul de „contopire” a unui scafandru cu apa. Mai ales când vine vorba de o ținere a respirației. vânător. Cu cât se îmbină mai mult
Din cartea Balance in Motion. Scaunul pilotului autor Dietze Susanna von1.2.1 Cinematica tragerilor. 1.2.1.1 Caracteristici spațiale. Adesea, din cauza unei poziții de start alese fără succes, un sportiv în competiții nu poate arăta rezultatul pe care îl demonstrează cu ușurință la antrenament. aderență nesigură,
Din cartea Mănâncă și fii tânăr. Secretele unei alimentatii corecte autorul Lanz Karl Din cartea autoruluiLocalizarea punctelor vulnerabile pe corpul uman Zonele în care se află punctele vulnerabile ale corpului includ perineul, plexul solar, coaste, inima, ficatul, splina, axilele, rinichii, coccisul.Multe vase mari și nervi trec prin perineu, de mai sus
Din cartea autorului3.3. Găsirea celor mai importante puncte de orientare pe propriul corp Numai cunoștințele teoretice despre anatomie te vor ajuta cu greu să înveți să călărești. Pentru a condimenta acest capitol foarte important despre anatomie, aș recomanda să vă puneți acum pantaloni scurți de antrenament,
Din cartea autorului5.3. Determinarea celor mai importante puncte de orientare asupra corpului Din nou, apare întrebarea cât de bine vă cunoașteți propriul corp. Înainte de a începe să cauți cele mai importante puncte, examinează-te în fața oglinzii și răspunde-ți: * Care sunt contururile centurii tale de umăr, el
Din cartea autorului6.3. Determinarea celor mai importante puncte de orientare pe propriul corp Un punct important de orientare este coloana vertebrală anterioară superioară a pelvisului (Fig. 6.8), pe care ai găsit-o deja la studierea capitolului despre pelvis. Este situat la nivelul articulației șoldului și, prin urmare, este foarte important pentru observare
Din cartea autoruluiCapitolul trei. Într-un corp sănătos minte sănătoasă! 3.1. O siluetă zveltă de mulți ani Mâncărurile multicomponente sunt greu de preparat, conținutul lor caloric crește de multe ori datorită conținutului de diferite produse cu proteine și carbohidrați uneori incompatibile. Chiar și s-ar părea
Una dintre principalele proprietăți caracteristice ale perechilor cinematice este numărul celor mai simple mișcări relative, pe care legăturile mecanismului le pierd atunci când sunt conectate în perechi cinematice. Să explicăm acest lucru cu un exemplu. Se știe că un corp rigid liber are șase grade de libertate. Mișcarea sa arbitrară în spațiu poate fi reprezentată ca rezultat al adunării a șase mișcări independente: trei de translație paralele cu axele de coordonate Ox, ooh, ozși trei de rotație în jurul axelor paralele cu aceste axe (Fig. 1.2). În funcție de tipul de conexiuni ale legăturilor mecanismului, una dintre ele poate efectua una, două, trei, patru sau cinci mișcări dintre cele șase enumerate mai sus față de cealaltă. În consecință, perechile cinematice impun anumite restricții asupra mișcărilor relative ale legăturilor, care depind de metoda de conectare a acestora. Se numesc astfel de restricții conexiuni. Număr S legături (geometrice), limitând mișcarea relativă a legăturilor, este determinată de egalitate S= 6 – IT, unde W- numărul de grade de libertate a legăturilor care formează o pereche cinematică.
Academicianul I. I. Artobolevsky a introdus o clasificare a perechilor cinematice, conform căreia toate perechile de
Orez. 1.2
sunt împărțite în cinci clase în funcție de număr S.Împărțirea perechilor cinematice pe clasă este prezentată în tabel. 1.1. Săgețile marchează aici posibilele deplasări ale legăturilor, care se păstrează după formarea unei perechi. Pentru fiecare clasă este indicat numărul de grade de libertate Wși numărul de conexiuni geometrice S. Sunt date imagini condiționate ale perechilor cinematice de diferite clase.
Tabelul 1.1
|
Reprezentarea schematică a perechilor cinematice |
Condiţional imagine |
Clasa perechi cinematice |
||
|
|
||||
|
|
||||
|
|
||||
|
|
||||
|
|
||||
|
|
||||
|
|
||||
|
|
||||
|
|









Perechile cinematice sunt împărțite în inferioare și superioare, în funcție de tipul elementelor lor constitutive. Cele mai joase perechi cinematice, ale căror elemente sunt suprafețe, includ perechi de translație, rotație, sferice, elicoidale și plane (vezi Tabelul 1.1). Punctele și liniile sunt elemente ale perechilor cinematice superioare. Perechile cinematice superioare includ perechile „bilă în plan” și „cilindr în plan” (vezi Tabelul 1.1). Avantajele perechilor inferioare sunt capacitatea lor de a transmite forte semnificative cu o uzura mai mica comparativ cu perechile superioare; pentru perechile superioare - capacitatea de a reproduce cu ajutorul lor mișcări relative destul de complexe.
Lanțuri cinematice
Lanț cinematic– acesta este un sistem conectat de legături care formează perechi cinematice între ele. Lanțurile cinematice pot fi împărțite în plane și spațiale, simple și complexe, închise și deschise (Fig. 1.3). La simplu include lanțuri în care fiecare verigă este inclusă în cel mult două perechi cinematice (Fig. 1.3, a, b, d); la dificil - lanțuri care au legături incluse în trei sau mai multe perechi cinematice (Fig. 1.3, c); la închis- lanțuri în care fiecare verigă este inclusă în cel puțin două perechi cinematice (Fig. 1.3, b– G), la deschis - lanțuri care au legături incluse într-o singură pereche cinematică (Fig. 1.3, A). Toate verigile mobile ale unui lanț cinematic plat fac mișcări paralele cu același plan fix (vezi Fig. 1.1). În lanțurile cinematice spațiale, punctele verigilor descriu curbe spațiale sau se deplasează de-a lungul curbelor plate situate în planuri care se intersectează (Fig. 1.4).
Prin introducerea conceptului de lanț cinematic se poate da o altă definiție pentru mecanismele compuse numai din corpuri solide. mecanism se numește lanț cinematic în care, cu o verigă fixă (rack) și o mișcare dată a uneia sau mai multor legături (leading) toate celelalte link-uri (sclavi) efectuați mișcări bine definite. Mecanismele pot fi formate atât din lanțuri cinematice închise cât și deschise. Un exemplu de lanț cinematic deschis este mecanismul unui manipulator elementar (Fig. 1.5).

Orez. 1.3

Orez. 1.4
Orez. 1.5
Majoritatea mecanismelor sunt formate din lanțuri cinematice închise (vezi Fig. 1.1, 1.4).
În studiul mecanismelor, se folosesc imaginile lor condiționate, se întocmesc scheme structurale, cinematice și alte scheme. Diagramele structurale sunt realizate sub forma unui desen, pe care, ținând cont de simbolurile stabilite de GOST, ele înfățișează legături, perechi cinematice, indică rack și legăturile conducătoare (vezi Fig. 1.1). Se numesc diagrame structurale realizate la o anumita scara diagrame cinematice.
Structura mecanismului.
Clasificarea perechilor cinematice
Perechile cinematice (KP) sunt clasificate după următoarele criterii:
1) în funcție de tipul punctului de contact (punct de legătură) al suprafețelor de legătură:
Cele inferioare, în care contactul legăturilor se realizează de-a lungul unui plan sau a unei suprafețe (perechi de alunecare);
Mai înalt, în care contactul legăturilor se realizează de-a lungul liniilor sau punctelor (perechi care permit alunecarea cu rulare). Ele se găsesc, de exemplu, în mecanismele de angrenaje și came).
2) în funcție de mișcarea relativă a legăturilor care formează o pereche:
Rotațional;
Translațional;
Cilindric;
sferic;
Şurub;
Apartament.
Un mecanism ale cărui legături formează doar perechi rotaționale, translaționale, cilindrice și sferice se numește pârghie.
3) conform metodei de închidere (asigurarea contactului între legăturile perechii):
Puterea (datorită acțiunii forțelor de greutate sau a forței elastice a unui arc);
Geometric (datorită designului suprafețelor de lucru ale perechii).


Fig.2.1 Fig.2.2
4) în funcţie de numărul de mobilităţi în mişcarea relativă a verigilor.
5) în funcție de numărul de condiții de legătură impuse mișcării relative a legăturilor (numărul de condiții de legătură determină clasa perechii cinematice);
Corpul, fiind în spațiu (în sistemul de coordonate cartezian X, Y, Z) are 6 grade de libertate. Se poate mișca de-a lungul fiecăreia dintre cele trei axe X, Y și Z, precum și se poate roti în jurul fiecărei axe (Fig. 2.3). Dacă un corp (legătură) formează o pereche cinematică cu un alt corp (legătură), atunci își pierde unul sau mai multe dintre aceste 6 grade de libertate.

Orez. 2.3. Grade de libertate ale corpului în spațiu
Toate perechile sunt împărțite în cinci clase, în funcție de numărul de legături impuse mobilității fiecăreia dintre legături. De exemplu, dacă corpurile (legăturile) care au format o pereche cinematică au pierdut 5 grade de libertate fiecare, această pereche se numește pereche cinematică de clasa a 5-a. Dacă se pierd 4 grade de libertate - clasa a IV-a etc. Numărul de grade de libertate este indicat prin . Numărul de conexiuni impuse este notat cu . În acest caz, numărul de grade de mobilitate poate fi determinat prin formula: .
Pereche de clasa I: ; .
Clasa a doua pereche: ; .
Clasa a treia pereche: ; .
Cuplu din clasa a patra: ; .
Cuplu clasa a cincea: ; .


Exemple de clasificare a perechilor:

Luați în considerare perechea cinematică „șurub-piuliță” (Fig. 2.4). Numărul de grade de libertate al acestei perechi este 1, iar numărul de legături impuse este 5. Această pereche va fi o pereche de clasa a cincea, un singur tip de mișcare pentru un șurub sau piuliță poate fi ales liber, iar al doilea mișcarea va fi însoțitoare.

Fig.2.4
Clasificarea lanțurilor cinematice
Mai multe legături interconectate prin perechi cinematice formează un lanț cinematic.
Lanțurile cinematice sunt:
Închis (simplu). Într-un lanț închis, fiecare verigă include cel puțin două perechi cinematice.

Deschis (simplu).
Complex.
Pe baza prezenței ramurilor distinge lanțuri simplu(fiecare verigă a lanțului nu include mai mult de două perechi cinematice) și complex sau ramificat(unele link-uri vin în trei sau mai multe perechi); așa-numitele balamale multiple (duble, triple etc.) pot fi prezente în lanțurile ramificate.
După zona de mișcare a legăturilor lanțurile sunt apartament(traiectoriile punctelor tuturor legăturilor sunt curbe plate situate în planuri paralele) și spațială.
Pentru a obține un mecanism dintr-un lanț cinematic este necesar:
Faceți o legătură imobilă, de ex. formați un cadru (rack);
Stabiliți legea mișcării pentru una sau mai multe verigi (faceți-le să conducă) astfel încât toate celelalte legături să facă mișcările necesare necesare.
Câteva definiții suplimentare:
Coordonata mecanismului generalizat- fiecare dintre coordonatele independente care determină poziția tuturor legăturilor mecanismului față de rack;
Numărul de grade de libertate ale mecanismului- acesta este numărul de grade de libertate ale întregului lanț cinematic raportat la veriga fixă (rack).
Pentru un lanț cinematic spațial în termeni generali, notăm condiționat:
Numărul de legături în mișcare - n,
Numărul de grade de libertate ale tuturor acestor legături este 6n,
Numărul de perechi cinematice din clasa a 5-a - P 5,
Numărul de legături impuse de perechile cinematice din clasa a 5-a pe legăturile incluse în ele este 5Р 5,
Numărul de perechi cinematice din clasa a 4-a - R 4,
Numărul de legături impuse de perechile cinematice de clasa a IV-a pe legăturile incluse în acestea este 4P 4 etc.
Legăturile lanțului cinematic, formând perechi cinematice cu alte legături, pierd unele din gradele de libertate. Numărul rămas de grade de libertate ale lanțului cinematic în raport cu rack poate fi calculat prin formula
Aceasta este formula structurală a lanțului cinematic spațial, sau formula Malyshev, obținută de P.I. Somov în 1887 și dezvoltat de A.P. Malyshev în 1923.
Valoarea lui W se numește gradul de mobilitate a mecanismului (dacă un mecanism este format dintr-un lanț cinematic).
Pentru un lanț cinematic plat și, în consecință, pentru un mecanism plat
![]()
Această formulă se numește P.L. Cebişev (1869). Poate fi obținut din formula Malyshev, cu condiția ca în plan corpul să nu aibă șase, ci trei grade de libertate:
Valoarea W arată câte legături conducătoare ar trebui să aibă mecanismul (dacă W = 1 - una, W = 2 - două verigi principale etc.).
Conceptul de sinteză și analiză structurală
Structura oricărui sistem tehnic este determinată de un set de elemente conectat funcțional și de relațiile dintre ele. În același timp, pentru mecanisme, elementele sunt înțelese ca legături, grupuri de legături sau mecanisme tipice, iar relațiile ca legături mobile (KP) sau fixe. Prin urmare, sub structura mecanismului este înțeles ca totalitatea elementelor sale și a relațiilor dintre ele, i.e. un set de legături, grupuri sau mecanisme tipice și conexiuni mobile sau fixe. Structura geometrică a mecanismului este descrisă pe deplin prin specificarea formei geometrice a elementelor sale, locația acestora și indicând tipul de conexiuni dintre ele. Structura unui mecanism poate fi descrisă în diferite etape de proiectare prin diverse mijloace, cu diferite niveluri de abstractizare: la nivel funcțional - o diagramă funcțională, la nivelul legăturilor și grupurilor structurale - o diagramă bloc etc. Schema structurala- o reprezentare grafică a mecanismului, realizată folosind simbolurile recomandate de GOST (a se vedea, de exemplu, GOST 2.703-68) sau acceptată în literatura specială, care conține informații despre numărul și locația elementelor (legături, grupuri), precum și asupra tipului și clasei perechilor cinematice care leagă aceste elemente. Spre deosebire de diagrama cinematică a mecanismului, diagrama structurală nu conține informații despre dimensiunile legăturilor și este desenată fără a respecta scara. (Notă: schema cinematica- un model grafic al unui mecanism conceput pentru a studia cinematica acestuia.)
Ca în orice etapă de proiectare în sinteza structurală, se disting sarcinile de sinteză și sarcinile de analiză.
Sarcina analizei structurale este sarcina de a determina parametrii structurii unui mecanism dat - numărul de legături și grupuri structurale, numărul și tipul de CP, numărul de mobilități (principale și locale), numărul de contururi și numărul de legături redundante .
Sarcina sintezei structurale este sarcina de a sintetiza structura unui nou mecanism cu proprietăți specificate: numărul de mobilitate, absența mobilității locale și a conexiunilor excesive, numărul minim de legături, cu perechi de un anumit tip (de exemplu, doar rotațional, ca cele mai avansate din punct de vedere tehnologic), etc.
Concepte de bază ale sintezei și analizei structurale
Mobilitatea mecanismului- numărul de coordonate generalizate independente care determină în mod unic poziția legăturilor mecanismului pe plan sau în spațiu.
Conexiune- restricţie impusă mişcării corpului de-a lungul coordonatei date.
Redundant (pasiv)- astfel de legături în mecanism care repetă sau duplică legăturile care există deja pe o coordonată dată și, prin urmare, nu modifică mobilitatea reală a mecanismului. În acest caz, mobilitatea calculată a mecanismului scade, iar gradul de indeterminare statică a acestuia crește. Uneori se folosește o altă definiție: Conexiuni redundante- acestea sunt legături, al căror număr în mecanism este determinat de diferența dintre numărul total de legături impuse de perechi cinematice și suma gradelor de mobilitate a tuturor legăturilor, mobilitatea locală și mobilitatea dată (necesară) a mecanism în ansamblu.
Mobilitatea locală- mobilitatea mecanismului, care nu afectează funcția de poziție (și funcțiile de transfer), dar sunt introduse în mecanism în alte scopuri (de exemplu, mobilitatea rolei în mecanismul cu came asigură o înlocuire în cea mai înaltă pereche de frecare de alunecare prin frecare de rulare).mecanisme şi maşini. Structura, cinematica și dinamica pârghiei articulate mecanisme: Tutorial. ...
Cinematic analiză mecanism pompa
Lucrări de curs >>Clădiri ( structurilor) mecanisme; - definirea prevederilor mecanisme si traiectorii... mecanism: I(4-1) → II(2-3) Mecanism se refera la mecanisme clasa a II-a conform clasificare I.I. Artobolevski. 1.2 Cinematic... în cinematic cupluri mecanism situat...
Analiza kinetostatică de forță mecanisme
Curs >> Fizică... clasificare forţe care acţionează în cinematic cupluri mecanisme? - Prezentați reacțiile în mod ideal cinematic cupluri apartament mecanism? - Enumerați tipurile de calcul al forței mecanisme ...
Teoria rezistenței materialelor mecanisme si masini
Curs >> Industrie, producție... mecanisme. TMM este o știință care studiază structura, cinematică și dinamică mecanisme... mașini și mecanisme. 14.1 Clasificare mașini și mecanisme O mașină este... include definiția unei reacții în cinematic cupluri mecanism, precum și forțele de echilibrare...
Proiectarea si studiul unei manivele-glisor mecanism hohote
Cursuri >> Industrie, producțieLink-uri pentru mecanism, n=5; P5 - număr cinematic aburi clasa V, P5 = 7; P4 - număr cinematic aburi clasa a IV-a... mecanismîn grupuri structurale Conform clasificare I. I. Artobolevsky, spargem cercetatul mecanismîn grupuri structurale. Mecanism ...
Mișcarea corpurilor rigide în mecanisme este considerată relativ la legătura, care este considerată condiționat ca imobilă și numită rack(pat mașină, carcasă motor, șasiu). Toate celelalte corpuri rigide care se mișcă în raport cu rack sunt numite legături în mișcare. Fiecare legătură poate consta din una sau mai multe părți, dar ca parte a legăturii nu pot avea mișcare relativă, adică. formează conexiuni dintr-o singură bucată sau detașabile ale pieselor individuale.
În funcție de funcțiile îndeplinite, legăturile pot fi de intrare și de ieșire, conducătoare și slave, inițiale și intermediare. link de intrare este raportată mișcarea, care este convertită de mecanism în mișcarea necesară a altor legături. Link principal- o verigă pentru care munca elementară a forțelor exterioare aplicate acesteia este pozitivă. link de ieșire- o veriga care realizeaza miscarea pentru care este destinat mecanismul. condus legătură- o verigă pentru care munca elementară a forțelor externe aplicate acesteia este negativă sau egală cu zero.
Dacă unei legături i se oferă una sau mai multe coordonate generalizate care determină poziția tuturor mecanismelor în raport cu rack, atunci legătura se numește iniţială.Coordonata mecanismului generalizat- aceasta este fiecare dintre coordonatele independente care determină poziția tuturor legăturilor mecanismului în raport cu rack.
În funcție de scopul mecanismului, legăturilor li se atribuie nume funcționale: manivelă, biela, culbutor, piston, tijă, glisor, legătură, came, împingător, roată dințată, purtător, satelit, pârghie, traversă, arbore cotit, arbore cu came si etc.
În mecanismele specifice, legătura de intrare poate fi atât condusă, cât și antrenată în anumite etape de mișcare, în funcție de forțele aplicate și momentele de forță, de exemplu, arborele motorului în modurile de accelerare și decelerare, arborele motorului în modurile motor și generator.
Amintește-ți asta pereche cinematică numiți legătura a două corpuri rigide ale mecanismului, permițând mișcarea relativă dată a acestora (vezi secțiunea 1.1). Într-o pereche, în timpul interacțiunii elementelor sale, are loc mișcarea relativă a legăturilor. Numărul de grade de libertateîn mişcarea relativă a legăturilor determină tipul de pereche prin mobilitate . Se disting perechile o singură mișcare, bimobile, tripartit, patru-mobileși cinci-mobile. Tipul unei perechi depinde de relațiile geometrice dintre elementele perechii, i.e. condiţii care limitează circulaţia legăturilor. Numărul de ecuații de constrângere dintr-o pereche este luat ca număr de clasă al perechii.
Fiecare element de interfață pereche cinematică este o colecție de suprafețe, linii și puncte individuale formate din elementele a două corpuri solide. Element – termen generic referitor la suprafața nominală , a cărui formă este specificată în desen sau în altă documentație tehnică. Suprafețele reale și profilele reale ale elementelor perechi pot avea abateri în formă și locație . Valoarea numerică a abaterilor limită este normalizată de toleranțele de cilindricitate, rotunjime, planeitate, dreptate, paralelism, în funcție de gradul de precizie și intervalul de dimensiuni. O suprafață este o parte comună a două regiuni adiacente ale spațiului. În teoria mecanismelor sunt luate în considerare suprafețele cu o formă ideală și o locație ideală. Dacă această condiție nu este îndeplinită, în perechi apar legături locale redundante. , deoarece ecuațiile de constrângere nu sunt identice, iar perechea devine static nedeterminată. Dacă elementele de conjugare din perechea cinematică sunt congruente, i.e. suprafețele coincid în toate punctele lor, atunci perechea se numește inferior. Se numesc perechile cu conjugare, al căror element este o linie sau un punct superior. O linie este o parte comună a zonelor adiacente ale unei suprafețe.
Se numește un sistem de legături conectate în perechi lanț cinematic. Există lanțuri cinematice plate și spațiale, închise și deschise, simple și complexe.
Într-un lanț închis, legăturile formează unul sau mai multe circuite. . Conturul poate fi rigid sau poate avea grade de libertate. Numărul de grade de libertate determină clasa de contur . Într-un lanț plat, toate verigile mobile fac o mișcare plană paralelă cu același plan fix. Într-un lanț simplu, o verigă este inclusă în una sau două perechi cinematice. Un lanț complex are cel puțin o verigă care formează mai mult de două perechi cinematice.
Analogii perechilor cinematice sunt conexiuni cinematice, alcătuit din mai multe piese mobile cu contact de suprafață, liniar sau punctual al elementelor sub forma unui design compact și care oferă capacitatea de a descompune mișcarea relativă în componente echivalente cu perechi de tipul corespunzător.
O diagramă a unui mecanism care conține un rack, legături mobile, perechi cinematice cu o denumire a tipului lor și care indică poziția relativă a elementelor mecanismului, realizate fără scară, se numește schema bloc a mecanismului.
Cel mai utilizat în mecanismele mașinilor, instrumentelor și altor dispozitive perechi rotative (LA), care permit o singură mișcare de rotație a unei verigi față de cealaltă. Pe diagramele structurale și cinematice, acestea au simboluri în conformitate cu recomandările standardelor internaționale (Fig. 2.1, A). Suprafețele nominale ale elementelor 1, 2 perechile rotative sunt de obicei cilindrice (Fig. 2.1, b), dar poate avea alte forme (de exemplu, conică, sferică). Pe fig. 2.1, în este dată schema bloc a manipulatorului unui robot industrial, pe care sunt indicate șase perechi rotative: O(0–1 ),DAR(1–2 ),LA(2–3 ),DIN(3–4 ),D(4–5 ),E(5–6 ) conectarea legăturilor cu numerele corespunzătoare. prindere 6 / are șase grade de libertate, care este egal cu numărul de perechi cu o singură mișcare ale unui lanț cinematic deschis. Proiectele reale folosesc adesea conexiuni cinematice care conțin mai multe legături mobile și mai multe perechi cinematice, dar într-un astfel de analog al unei perechi rotative, doar două legături sunt conectate la alte legături ale mecanismului. Designul unui rulment de rulare cu un exterior 1 și interne 2 inele cu bile între ele 3, ținute la o anumită distanță unele față de altele prin intermediul unui separator 4 prezentată în fig. 2.2, A.
Orez. 2.1. Diagrama structurală a unui braț robot industrial

Orez. 2.2. Rulmenți de rulare și simbolurile acestora
În funcție de direcția forței radiale sau axiale percepute, se disting lagărele radiale (Fig. 2.2, b), tracțiune (Fig. 2.2, în) și contact unghiular (Fig. 2.2, G). Diagramele folosesc simbolurile adecvate (Fig. 2.2, d). Suprafețele de lucru din rulmenți pot fi în contact direct (frecare uscată), separate prin lichid (lagăre lichide, hidrostatice, hidrodinamice), gaz (gaz aerodinamic, aerostatic) sau separate prin forțe magnetice (lagăre magnetice).
Când se folosesc îmbinări cinematice în locul unei perechi rotative, pierderile prin frecare sunt reduse, tehnologia pentru unitățile de fabricație este simplificată datorită utilizării rulmenților standard, iar capacitatea portantă a unităților mașinii este crescută. Se numește schema unei perechi cinematice care reflectă doar numărul necesar de legături geometrice de bază. Schema principală a perechii nu conține legături redundante. Schema reală a perechii poate conține legături suplimentare, dar acestea trebuie să fie identice (coincidente). Eliminarea legăturilor locale redundante în legătura cinematică la instalarea arborilor și osiilor pe mai mulți rulmenți este asigurată de precizia corespunzătoare a pieselor de fabricație și a montajului unităților de asamblare. Pe fig. 2.3 prezintă un arbore lung montat pe trei rulmenți cu bile DAR, DAR / , DAR // . Alinierea suprafețelor de bază (Fig. 2.3, A) lagărelor depinde de precizia găurilor din piesele carcasei și poate fi reglată prin instalarea carcaselor de rulmenți pe cadru (Fig. 2.3, b) în cazul abaterilor de la rectitudinea axei comune A A / DAR // datorită deplasării sau înclinării axelor rulmenților individuali. La elaborarea documentației tehnice pentru conexiunile cinematice, conform GOST 24642-81 și 24643-81, acestea indică de obicei abaterile maxime de la paralelismul suprafețelor de revoluție, abateri de la coaxialitate (runout radial), abateri de la concentricitate, abateri de la perpendicularitate.

Orez. 2.3. Arbore montat pe trei rulmenti
Pentru un exemplu din fig. 2.4 prezintă o diagramă a unui arbore cu doi rulmenți cu indicație pentru gâturi DARși LA toleranțe de cilindricitate (poz. 1 și 5 ), aliniere (poz. 2 și 6) și perpendicularitatea capetelor (poz. 3 și 4 ), care trebuie menținută la șlefuirea arborelui.

Orez. 2.4. Schema unui arbore cu doi rulmenti
Cerințe similare se aplică la realizarea găurilor în partea de bază (carcasa). În unele modele (Fig. 2.5), abaterile de la dreptate datorate nealinierii găurilor corpului (Fig. 2.5, A) sau înclinarea axelor (Fig. 2.5, b, în) sunt compensate de suprafața exterioară sferică a inelului exterior al rulmentului cu bile și de suprafața sferică din carcasa rulmentului. Prin asamblarea corectă a nodurilor se asigură rectitudinea axei conexiunii cinematice și identitatea legăturilor geometrice prin eliminarea legăturilor redundante.

Orez. 2.5. Scheme de instalare a arborelui cu abateri minore de la dreptate
Cu abateri semnificative ale axei arborelui de la dreptate (Fig. 2.6), arborele este montat pe rulmenți speciali cu o suprafață exterioară sferică a inelului exterior. O astfel de conexiune cinematică asigură rotirea arborelui în prezența deflexiunii gâturilor DARși DAR/ arborele din aliniere (Fig. 2.6, A) și dreptate (Fig. 2.6, b, c).

Orez. 2.6. Scheme de instalare a arborelui cu abateri semnificative de la dreptate
Se numește numărul de legături suplimentare într-un design real al unei perechi sau conexiuni cinematice gradul de indeterminare statică al perechii.
arbore cantilever 1 cu suport cilindric 2, încărcat la punct DIN forta F, este prezentat în fig. 2.7, A. în sprijinul DAR este posibil să se găsească momentul reactiv și reacția, precum și deviațiile în orice punct al arborelui, folosind metode statice. Deviație într-un punct DIN cu conditia A = b poate fi redus de opt ori dacă sunt introduse elemente identice în design DAR/ cu cinci legături suplimentare (Fig. 2.7, b). Numărul de legături locale identice poate fi redus dacă un rulment sferic plutitor este instalat la capătul drept al arborelui (Fig. 2.7, b), dând doar două obligațiuni suplimentare în suport DAR/ . Dacă arborele este instalat sub forma unei conexiuni cinematice cu doi lagăre sferice, dintre care unul plutitor, iar al doilea este fixat în direcția axială (Fig. 2.7, G), atunci arborele devine static determinat, în timp ce momentele reactive în suporturi sunt egale cu zero. Cu toate acestea, devierea unui astfel de arbore la punctul DIN(la A = b) este doar de două ori mai mică decât deformarea arborelui cantilever. Absența unor conexiuni locale excesive face ca proiectarea perechii să fie insensibilă la deformațiile de temperatură și forță ale arborelui și carcasei, precum și la abaterile în locația axelor elementelor de legătură.

Orez. 2.7. Scheme de instalare a arborelui pentru calcularea reacțiilor în suporturi
Deci, în cazul utilizării elementelor identice, toleranțele pentru forma și amplasarea suprafețelor de împerechere sunt reduse, ceea ce asigură asamblarea fără deformare a verigilor în lanțul cinematic și eliminarea forțelor suplimentare în perechile cinematice. Odată cu creșterea preciziei de împerechere, costurile de producție cresc, dar rigiditatea și capacitatea portantă a arborilor și axelor, fiabilitatea și durabilitatea mașinii cresc. Prin urmare, chestiunea admisibilității legăturilor identice, care, atunci când rack-ul sau alte legături sunt deformate, pot fi redundante, este rezolvată ținând cont de condițiile de funcționare ale perechii cinematice, de costurile de fabricație, reparare și exploatare a mașinii.
Designul optim al unei perechi sau conexiuni este un concept relativ: un design care este optim pentru anumite condiții poate fi inacceptabil pentru altele. Optimizarea este adesea asociată cu fabricabilitatea, care este înțeleasă ca un set de proprietăți de proiectare manifestate în costurile optime ale forței de muncă, materialelor, fondurilor și timpului pentru indicatorii dați de calitate, volumul de producție, condițiile de fabricație, funcționarea și repararea mașinii. Un design care este fabricabil într-o singură producție se dovedește adesea a fi puțin fabricabil în producția de masă și complet netehnologic într-o producție automatizată și invers.
Schemele și simbolurile principalelor tipuri de perechi cinematice sunt date în tabel. 2.1. Fiecare pereche din structurile reale poate corespunde unor variante constructive de conexiuni cinematice sub forma mai multor părți care au o combinație diferită de mobilitate locală care nu afectează mobilitatea principală a perechii. De exemplu, un rulment cu role este echivalent cu o pereche cilindrica cu doua miscari; un rulment sferic cu bile, care permite nealinierea axelor în anumite limite, este echivalent cu o pereche sferică cu trei mișcări; Un rulment axial cu bile cu o suprafață exterioară sferică montată pe o suprafață conică este echivalent cu o pereche de cinci puncte în mișcare.
Tabelul 2.1
Principalele tipuri de perechi cinematice

Îmbinările cinematice au de obicei un număr mare de legături locale redundante. Ele pot fi eliminate folosind principiul multithreading-ului. În astfel de modele, datorită preciziei ridicate de fabricație (de exemplu, bile și inele în rulmenți cu bile), legăturile locale în exces sunt identice. În acest caz, nedeterminarea statică a conexiunii nu afectează negativ funcționarea perechii de rotație.